Содержание страницы
В условиях современного мегаполиса, где плотность транспортного потока и дефицит парковочных мест стали обыденностью, маневрирование в ограниченном пространстве превратилось в настоящее испытание даже для опытных водителей. Именно для решения этой проблемы были созданы парковочные системы — комплексные электронные ассистенты, интегрированные в автомобиль для повышения активной безопасности и существенного облегчения процесса парковки. Эффективность этих систем, часто именуемых парктрониками, достигает своего пика при движении задним ходом, в условиях плохой видимости (ночью, в дождь), при наличии сильной тонировки стекол или в стесненных условиях гаражей и крытых паркингов.
История этих незаменимых помощников началась задолго до их массового внедрения. Первые патенты на устройства, использующие ультразвук для определения расстояния, появились еще в 1970-х годах. Однако одним из первых серийных автомобилей, оснащенных ультразвуковыми датчиками в бамперах, стал Toyota Corona в 1982 году. С тех пор технология прошла колоссальный путь развития, эволюционировав от простых звуковых сигнализаторов до сложнейших автопилотов, способных самостоятельно припарковать автомобиль.
Современные парковочные системы можно классифицировать на две фундаментальные группы: пассивные (предупреждающие) и активные (автоматические). Первая группа систем лишь предоставляет водителю исчерпывающую информацию о препятствиях, оставляя полный контроль над управлением. Вторая же способна брать на себя часть или даже все функции по управлению автомобилем в процессе парковки, действуя в автоматизированном или полностью автоматическом режиме.
Пассивные (предупреждающие) системы: Ваши глаза и уши
Пассивные ассистенты — это основа, с которой началась эра безопасной парковки. Их главная задача — своевременно информировать водителя о сокращении дистанции до препятствия. Сегодня на рынке представлено множество таких систем под различными коммерческими названиями:
- Parktronic System (PTS), Acoustic Parking System (APS) и Optical Parking System (OPS) на автомобилях концерна VAG (включая Audi);
- Parking Distance Control (PDC) на автомобилях BMW;
- Park Assistant на автомобилях Opel.
Эти системы могут быть установлены как заводская опция или как дополнительное оборудование. Нередко на одном автомобиле комбинируют несколько видов пассивных систем, например, звуковую сигнализацию и камеру заднего вида, для достижения максимальной информативности.
Термин «Парктроник» (Parktronic), изначально являвшийся торговой маркой Mercedes-Benz, благодаря своей популярности стал нарицательным именем для большинства ультразвуковых парковочных радаров. Классический парктроник состоит из трех ключевых компонентов: ультразвуковых датчиков, электронного блока управления (ЭБУ) и устройства индикации (звукового и/или визуального).
Звуковая система: Классика парковочных радаров
Звуковая система позволяет водителю интуитивно оценивать расстояние до ближайшего объекта по изменению тональности и частоты звуковых сигналов. В ее состав входят несколько ультразвуковых датчиков, монтируемых в передний и задний бамперы (рис. 1), центральный ЭБУ, управляющий логикой системы, и зуммеры (излучатели звука), расположенные в салоне.

Рис. 1. Расположение датчиков в заднем бампере автомобиля
Сердцем системы является ультразвуковой датчик. Он представляет собой компактный приемопередающий модуль (рис. 2), заключенный в прочный алюминиевый корпус. Внутри находится пьезоэлектрическая пластина, которая, получая электрический импульс, генерирует ультразвуковые волны, неслышимые для человеческого уха. Этот принцип работы напоминает эхолокацию у летучих мышей или дельфинов.
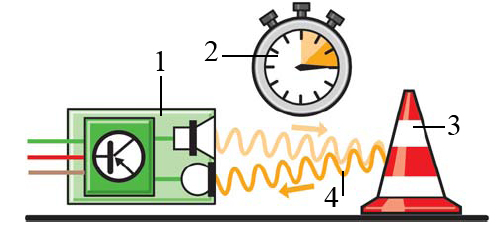
Рис. 2. Принципиальная схема работы ультразвукового датчика: 1 — ультразвуковой датчик; 2 — устройство для измерения времени; 3 — объект измерения; 4 — звуковые волны
Излученные звуковые волны распространяются в воздушной среде с постоянной скоростью. При стандартных условиях (атмосферное давление 1 бар и температура +20 °C) эта скорость составляет примерно 343 м/с. Волна, достигнув препятствия (например, стены или другого автомобиля), отражается от него и возвращается к датчику, который переключается в режим приема. Электронный блок измеряет время, прошедшее с момента отправки импульса до приема его отраженного эха. На основании этого времени по простой формуле S = (V * t) / 2 вычисляется точное расстояние до объекта. Современные системы также получают данные от датчика наружной температуры для внесения поправок в расчеты, так как скорость звука напрямую зависит от плотности воздуха.
Датчики активируются циклически, обычно каждые 25 мс, излучая короткий ультразвуковой импульс длительностью около 1 мс. После этого все сенсоры переходят в режим «прослушивания». ЭБУ анализирует данные со всех датчиков и информирует водителя о кратчайшем расстоянии до препятствия в каждой из зон контроля.
Логика работы системы продумана до мелочей: при движении вперед со скоростью до 15 км/ч активны только передние датчики. При включении передачи заднего хода автоматически активируются задние сенсоры. Расстояние, на котором датчики начинают уверенно обнаруживать препятствия, варьируется в зависимости от их расположения:
- Боковые задние датчики: ~ 60 см;
- Боковые передние датчики: ~ 90 см;
- Центральные задние датчики: ~ 120 см;
- Центральные передние датчики: ~ 160 см.
По мере приближения к объекту прерывистый звуковой сигнал становится все чаще и переходит в непрерывный, когда расстояние сокращается до критического:
- Спереди: ~ 25 см;
- Сзади (без фаркопа): ~ 30 см;
- Сзади (с тягово-сцепным устройством): ~ 35 см.
В более продвинутых версиях звуковое оповещение дублируется визуальной индикацией на дисплее мультимедийной системы или приборной панели. Контролируемая зона делится на секторы, соответствующие каждому датчику (рис. 3), и цветные сегменты наглядно показывают приближение к препятствию.
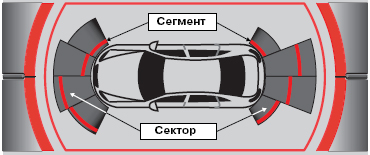
Рис. 3. Изображение на дисплее парковочного ассистента: 1 — сегмент; 2 — сектор
Системы обзора с видеокамерами
Логичным развитием пассивных систем стало добавление камер заднего вида, которые транслируют изображение на дисплей в салоне. Камера, обычно интегрированная в ручку крышки багажника или в рамку номерного знака, автоматически активируется при включении задней передачи. Это позволяет водителю не только «слышать», но и «видеть» все, что происходит позади автомобиля. Часто на изображение накладываются динамические парковочные линии, которые изгибаются при повороте руля, показывая предполагаемую траекторию движения.
Наиболее совершенные пассивные системы используют несколько камер (в переднем бампере, задней двери и боковых зеркалах) для создания системы кругового обзора (Surround View). Электроника «сшивает» изображения с четырех камер в единую картинку, создавая эффект вида на автомобиль «с высоты птичьего полета» и полностью устраняя «слепые» зоны.
Несмотря на свою пользу, пассивные системы лишь помогают водителю, но не избавляют его от ответственности и необходимости самостоятельно выполнять маневр. Следующим шагом в эволюции стали системы, способные действовать.
Система автоматической парковки (Парковочный автопилот)
Система автоматической парковки, также известная как интеллектуальный парковочный ассистент или парковочный автопилот, относится к классу активных систем. Ее ключевое отличие — способность самостоятельно управлять рулевым колесом для выполнения маневра. Водителю остается лишь контролировать скорость с помощью педалей и следовать инструкциям системы.
Это яркий пример синергии различных электронных систем современного автомобиля. Для своей работы парковочный автопилот использует данные и исполнительные механизмы множества компонентов, объединенных высокоскоростной шиной CAN (Controller Area Network). В процессе парковки задействованы:
- Система курсовой устойчивости (ESP) для контроля траектории;
- Блоки управления двигателем и коробкой передач;
- Электромеханический усилитель рулевого управления (EPS);
- Тормозная система с ABS и ESP;
- Датчики угла поворота руля и скорости вращения колес;
- Система распознавания прицепа (если имеется).
Все эти компоненты должны соответствовать строгим требованиям безопасности, которые в странах Евразийского экономического союза регламентируются межгосударственным стандартом ГОСТ 33997-2016 «Колесные транспортные средства. Требования к безопасности в эксплуатации и методы проверки», являющимся частью технического регламента Таможенного союза ТР ТС 018/2011. Этот стандарт устанавливает общие требования к электронным системам, влияющим на безопасность, включая их электромагнитную совместимость и отказоустойчивость.
Ведущие автопроизводители разработали собственные версии парковочных автопилотов:
- Park Assist на автомобилях Volkswagen;
- Intelligent Parking Assist System (IPAS) на автомобилях Toyota и Lexus;
- Remote Park Assist System на автомобилях BMW (позволяет парковаться с ключа, находясь вне автомобиля);
- Active Park Assist на автомобилях Mercedes-Benz и Ford;
- Advanced Park Assist на автомобилях Opel.
Принцип работы и этапы автоматической парковки
Процесс парковки с помощью автопилота можно условно разделить на четыре последовательных этапа.
1. Активация и выбор режима
Водитель активирует систему нажатием специальной кнопки на центральной консоли. Затем с помощью указателей поворота он сообщает системе, с какой стороны от автомобиля необходимо искать место — справа или слева (актуально для улиц с односторонним движением).
2. Поиск подходящего парковочного места
При движении вдоль ряда припаркованных автомобилей со скоростью не выше 30 км/ч боковые ультразвуковые датчики с увеличенной дальностью действия (до 4,5 м) сканируют пространство, измеряя длину доступного «кармана» (рис. 4, а). Система ищет место, длина которого превышает длину автомобиля на определенную величину (обычно от 0,8 до 1,2 метра), достаточную для маневра в один прием.

Рис. 4. Процесс поиска подходящего свободного места на стоянке: а — поиск места для парковки; б — прерывание процесса поиска
Если в процессе поиска автомобиль отклоняется от параллельной траектории более чем на 20° (рис. 4, б), система может прервать поиск, посчитав, что водитель выполняет другой маневр.
Пока подходящее место не найдено, на дисплее отображается стилизованная обочина (рис. 5, а). Как только система находит подходящий «карман», он отображается на экране (рис. 5, б). Система просит водителя проехать немного вперед, чтобы занять оптимальную стартовую позицию. Когда позиция достигнута, на дисплее появляется символ «R» и стрелка, сигнализируя о готовности к началу маневра (рис. 5, в).
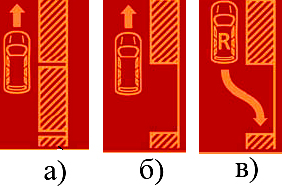
Рис. 5. Отображение свободного места при парковке: а — свободное место не найдено; б — свободное место имеется; в — начало парковки
3. Парковка с автоматическим рулением
Водитель включает передачу заднего хода и отпускает руль. С этого момента ЭБУ парковочного автопилота берет управление рулевым колесом на себя. Водитель контролирует лишь скорость (не более 7 км/ч), плавно работая педалями. Весь маневр запрограммирован в памяти блока управления и выполняется в несколько точных этапов:
- Этап 1: Автомобиль начинает движение назад с прямыми колесами, занимая исходную точку траектории (рис. 6).
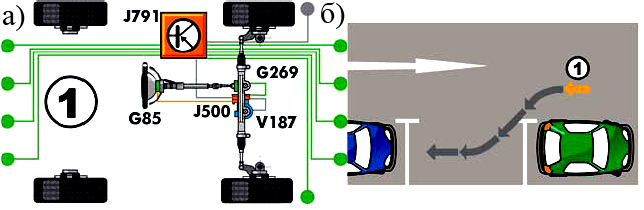
Рис. 6. Этап парковки 1: а — процесс регулирования; б — процесс парковки; 1 — датчик угла поворота колеса; 2 — блок управления парковочного автопилота; 3 — датчик момента поворота рулевого колеса; 4 — блок управления усилителя рулевого управления; 5 — электродвигатель электромеханического усилителя рулевого управления
- Этап 2: ЭБУ подает команду на электроусилитель, и руль поворачивается на рассчитанный угол. Автомобиль начинает заезжать в парковочный карман по дуге (рис. 7).
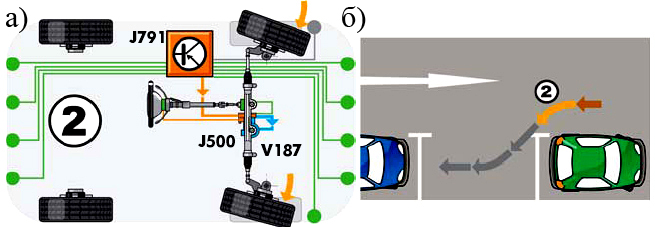
Рис. 7. Этап парковки 2: а — процесс регулирования; б — процесс парковки (позиции соответствуют позициям рис. 6)
- Этап 3: В нужный момент, рассчитанный на основе данных с датчиков, система выравнивает колеса для движения прямо назад (рис. 8).
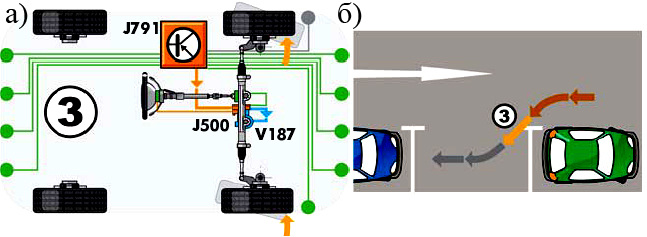
Рис. 8. Этап парковки 3: а — процесс регулирования; б — процесс парковки (позиции соответствуют позициям рис. 6)
- Этап 4: Колеса поворачиваются в противоположную сторону, чтобы выровнять автомобиль параллельно бордюру или другим машинам (рис. 9). Звуковые сигналы парктроника информируют о расстоянии до сзади стоящего автомобиля.
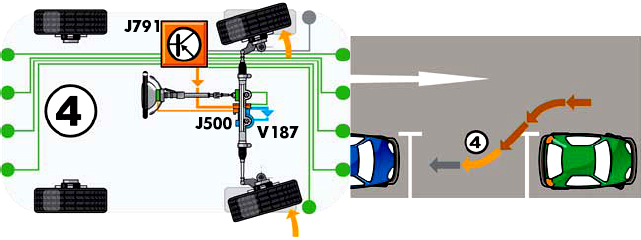
Рис. 9. Этап парковки 4: а — процесс регулирования; б — процесс парковки
4. Завершение процесса парковки
Когда автомобиль практически занял свое место, система подает сигнал о необходимости остановиться. Если требуется финальная коррекция, автопилот попросит водителя включить первую передачу и проехать немного вперед для идеального выравнивания (рис. 10). Как только маневр будет полностью завершен, на дисплее появится сообщение: «Автоматическая парковка завершена!». Автоматическое руление отключается, и водитель получает полный контроль над автомобилем.
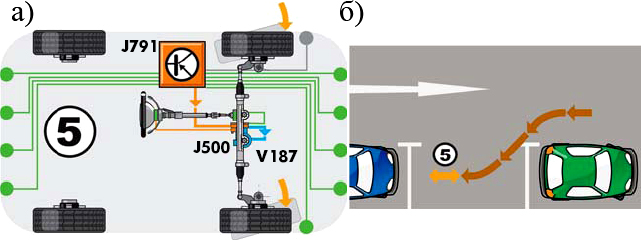
Рис. 10. Этап парковки 5: а — процесс регулирования; б — процесс парковки
Заключение: Будущее парковочных технологий
Системы помощи при парковке прошли невероятный путь эволюции — от простого зуммера до сложного интеллектуального ассистента, способного выполнять сложные маневры точнее и безопаснее многих водителей. Современные системы последнего поколения, такие как Park Assist, используют до 12 ультразвуковых датчиков, камеры кругового обзора и даже радары для создания полной картины окружающего пространства. Они умеют выполнять не только параллельную, но и перпендикулярную парковку, а также самостоятельно выезжать с парковочного места.
Технологии не стоят на месте. Следующим шагом является полная автоматизация парковки, когда автомобиль, используя данные V2X (Vehicle-to-Everything), сможет самостоятельно находить свободное место на многоуровневой парковке и парковаться без участия человека. Эти системы являются важнейшим этапом на пути к созданию полностью беспилотного транспорта, который навсегда изменит наше представление о мобильности и комфорте.
