Современные автомобили оснащаются множеством технологий, которые делают их эксплуатацию более безопасной и удобной. Одной из таких систем является система кругового обзора, которая значительно улучшает маневренность автомобиля в ограниченных пространствах. Эта система использует несколько камер для создания панорамного изображения вокруг автомобиля, помогая водителю избежать возможных столкновений и повысить комфорт при парковке и движении в сложных условиях.
С момента появления системы кругового обзора, её технологии постоянно совершенствуются, добавляются новые функции и возможности для улучшения безопасности и комфорта. Сегодня многие автомобили премиум-класса и не только оснащены системой кругового обзора, которая значительно облегчает парковку, маневрирование и движение в ограниченных условиях.
Система кругового обзора — это важная часть современных технологий активной безопасности автомобилей, предназначенная для помощи водителю при маневрировании в ограниченных пространствах, например, при параллельной или перпендикулярной парковке, а также в процессе движения между рядами или выезде с «слепого» перекрестка. Эта система является неотъемлемой частью мультимедийных комплексов автомобилей. Основной принцип ее работы заключается в том, что система снимает обстановку вокруг автомобиля и отображает информацию на экране.
Система кругового обзора является усовершенствованной версией оптической парковочной системы, которая использует камеру заднего вида. Впервые такую технологию внедрила компания Nissan в 2007 году. Сегодня подобная система доступна у множества ведущих производителей автомобилей, таких как Mercedes-Benz, BMW, Volkswagen, Land Rover, Toyota и, конечно, Nissan. Некоторые из этих систем имеют собственные наименования:
- Around View Monitor (AVM), использующаяся на автомобилях Nissan;
- Surround Camera System, разработанная для автомобилей Land Rover;
- Area View, установленная на автомобилях Volkswagen.
Система кругового обзора Area View представляет собой интегрированную с помощью камер систему мониторинга окружающей среды. Она является дальнейшим развитием камеры заднего вида, но в отличие от нее, позволяет контролировать пространство вокруг всего автомобиля, а не только позади него.
Система предлагает различные варианты отображения информации, которые могут быть выбраны в зависимости от дорожной ситуации и потребностей водителя.
Круговой обзор осуществляется с помощью четырех камер, скрыто установленных на автомобиле, что представлено на рисунке 1.

Рис. 1. Зона контроля окружающего пространства с помощью четырех видеокамер
Расположение камер на автомобиле следующее: передняя камера интегрирована в решетку радиатора, задняя — в ручку дверцы багажного отсека, а боковые камеры установлены в нижней части наружных зеркал заднего вида. Все эти камеры обладают широкоугольными линзами, что позволяет захватывать все пространство вокруг автомобиля, в том числе «мертвые зоны».
Камеры подключены к блоку управления наружных камер через высокоскоростные линии передачи данных. Эти линии обеспечивают не только питание и управление камерами, но и передачу видеосигнала в цифровом формате с использованием технологии LVDS (Lowvoltage Differential Signaling), что гарантирует качественную и быструю передачу данных.
Когда водитель включает задний ход или активирует кнопку системы парковки, на экране радионавигационной системы появляется миниатюрное изображение автомобиля с перспективы «птичьего полета». При необходимости можно выбрать детализированное отображение одной из сторон автомобиля — правой, левой, передней или задней.
В зависимости от выбранного режима отображения на экране появляются статические и динамические вспомогательные линии. Эти линии помогают водителю точнее определить расстояние до препятствий (красные или зеленые прямые линии) и возможную траекторию движения автомобиля в зависимости от угла поворота рулевого колеса (кривые желтые линии), что можно увидеть на рисунке 2.
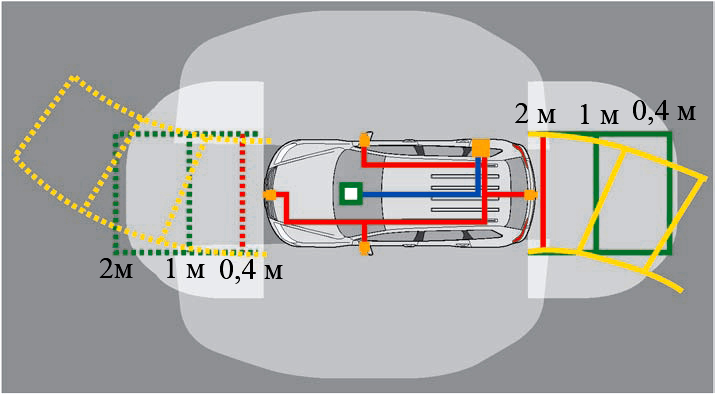
Рис. 2. Отображение на дисплее дистанции и возможной траектории движения
Отображение с перспективы «птичьего полета» (рис. 3, а) формируется путем объединения четырех изображений, полученных с камер. Блок управления обрабатывает эти изображения и составляет общий вид окружающего пространства. В данном режиме на экране также отображается силуэт автомобиля, что позволяет водителю оценить его положение относительно окружающих объектов.
Режим «помехи в поперечном направлении» (рис. 3, б) обеспечивает обзор более чем на 90° влево и вправо с самой передней точки автомобиля, давая водителю возможность «заглянуть за угол» и оценить ситуацию на дороге.
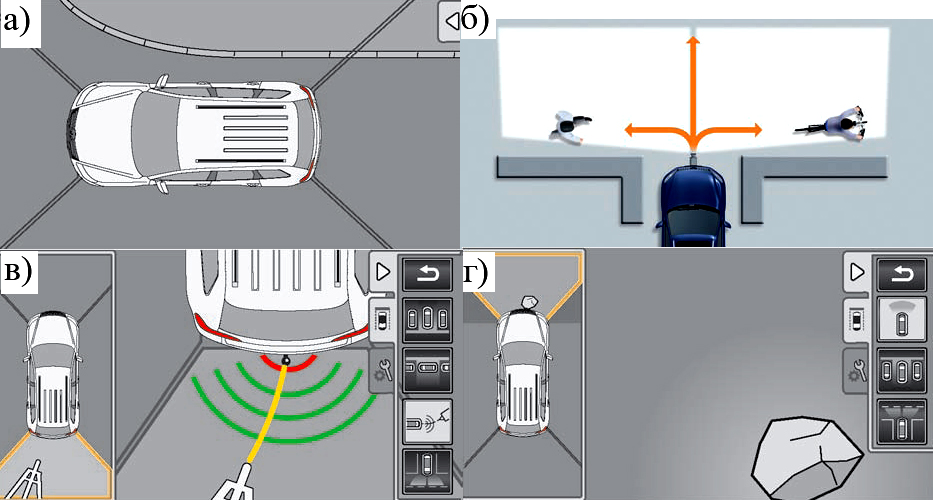
Рис. 3. Отображения на дисплее: а — «с перспективы птичьего полета»; б — «помехи в поперечном направлении»; в — «помощь при подсоединении прицепа»; г — «пересеченная местность»
Режим «помощь при подсоединении прицепа» (рис. 3, в) использует заднюю камеру для того, чтобы помочь водителю прицепить прицеп. Этот режим показывает пространство за автомобилем с видом сверху, что значительно упрощает процесс подсоединения.
Режим «пересеченная местность» (рис. 3, г) полезен при движении по сложным участкам дороги, где могут быть труднопредсказуемые препятствия. Он позволяет водителю видеть объекты непосредственно перед автомобилем с перспективы птичьего полета.
Интересные факты:
-
Развитие технологий: Изначально системы кругового обзора использовали камеры с низким разрешением, однако с развитием технологий видеосъемки и передачи данных, современные камеры обеспечивают гораздо более четкое и детализированное изображение.
-
Разные названия у разных брендов: В зависимости от марки автомобиля, система кругового обзора может иметь различные наименования, например, Surround Camera System у Land Rover или Area View у Volkswagen.
-
Дополнительные функции: Современные системы кругового обзора не только показывают «птичий обзор», но и могут отображать возможную траекторию движения, помогать при подсоединении прицепа или даже показывать информацию о препятствиях, находящихся перед автомобилем.
-
Преимущества для водителей с ограниченными возможностями: Эта система особенно полезна для водителей с ограниченными возможностями или для людей, которым сложно оценить пространство вокруг машины из-за различий в поле зрения. Система обеспечивает большую безопасность и удобство при парковке или маневрировании.
Заключение:
Система кругового обзора представляет собой важный шаг в развитии технологий активной безопасности автомобилей. Она значительно облегчает процесс парковки и маневрирования, особенно в условиях ограниченного пространства или при наличии различных препятствий. С течением времени эти системы становятся более доступными и эффективными, расширяя возможности водителей по контролю за окружающей обстановкой.
С каждым годом такие технологии внедряются в автомобили всё чаще, что говорит о растущем интересе к безопасности на дорогах и улучшении комфорта водителей. В будущем можно ожидать ещё больше усовершенствований, включая улучшенные камеры с высоким разрешением и дополнительную интеграцию с другими системами помощи водителю.
Регулярно публикую материалы о передовых методах обработки и сварки материалов, а также освещаю новинки в сфере производства,материаловедения, строительства и др.