Безопасность дорожного движения — один из ключевых факторов, определяющих развитие автомобильной отрасли в XXI веке. С момента появления первых автомобилей вопросы безопасности интересовали как инженеров, так и пользователей, но настоящая революция произошла с развитием систем активной безопасности. Эти системы работают на предупреждение ДТП, обеспечивая надежную связь между техническими характеристиками транспортного средства, дорожной обстановкой и действиями водителя. В отличие от пассивной безопасности, активные системы стремятся предотвратить сам факт аварии, а не смягчить её последствия.
Современный автомобиль буквально «напичкан» электронными помощниками, многие из которых работают незаметно для водителя, но критически важны при нестабильной дорожной ситуации. Классификация этих систем позволяет понять не только их функции, но и логику их построения, что особенно актуально для инженеров, механиков, экспертов по безопасности и автолюбителей, стремящихся разобраться в устройстве современных автомобилей.
Первой в мире системой активной безопасности, положившей начало целому направлению в автомобильной индустрии, считается антиблокировочная система тормозов (ABS). Её прообраз был разработан ещё в 1929 году для самолётов, но адаптирован для автомобилей лишь спустя несколько десятилетий. В 1978 году компания Bosch совместно с Mercedes-Benz внедрила первую электронную версию ABS в серийную модель Mercedes-Benz S-класса.
Следующим значимым шагом стало появление антипробуксовочной системы (ASR) в 1980-х годах, а затем — электронной системы курсовой устойчивости (ESP), впервые реализованной в конце 1990-х. Эти технологии не просто увеличили безопасность — они изменили саму философию управления автомобилем, сделав вождение более предсказуемым даже в критических ситуациях.
Активная безопасность транспортного средства (ТС) представляет собой совокупность его конструктивных и эксплуатационных характеристик, обеспечивающих предотвращение дорожно-транспортных происшествий (ДТП), а также исключение условий, способствующих их возникновению. Эти условия могут быть связаны как с особенностями конструкции автомобиля, так и с дорожной ситуацией либо действиями водителя. Ключевая задача систем активной безопасности заключается в минимизации вероятности аварийных ситуаций в процессе эксплуатации.
Среди наиболее распространённых и значимых компонентов активной безопасности можно выделить следующие системы:
- антиблокировочная система тормозов;
- антипробуксовочная система;
- система курсовой устойчивости;
- система распределения тормозных усилий и подтормаживания;
- система управления динамикой и стабилизацией.
Эти системы образуют базу современных решений в области активной безопасности, и они будут подробно рассмотрены в данной главе.
Наряду с основными, существуют и вспомогательные системы активной безопасности, известные также как ассистенты водителя. Они играют значимую роль в обеспечении безопасного управления ТС в сложных условиях. К таким системам относятся:
- парктроник;
- адаптивный круиз-контроль;
- система помощи при спуске;
- система помощи при подъеме;
- электромеханический стояночный тормоз и другие подобные устройства.
Кроме того, важным элементом безопасности ТС являются ранее рассмотренные устройства, направленные на улучшение пассивной безопасности (см. раздел 4). Их цель — снижение тяжести последствий при ДТП либо предотвращение получения травм. Комплексный подход с участием как активных, так и пассивных средств позволяет создать условия для максимально безопасного передвижения. Среди новых технологических решений можно выделить системы, отслеживающие рядность движения, предупреждающие о столкновениях, фиксирующие наличие объектов в мёртвых зонах, а также адаптивный дальний свет фар.
Автоматические системы активной безопасности классифицируются в зависимости от способа формирования управляющих алгоритмов, воздействующих на исполнительные механизмы. В соответствии с источником [8], такие системы подразделяются на три типа: по принципу разомкнутого управления, компенсации и обратной связи (см. рис. 1).
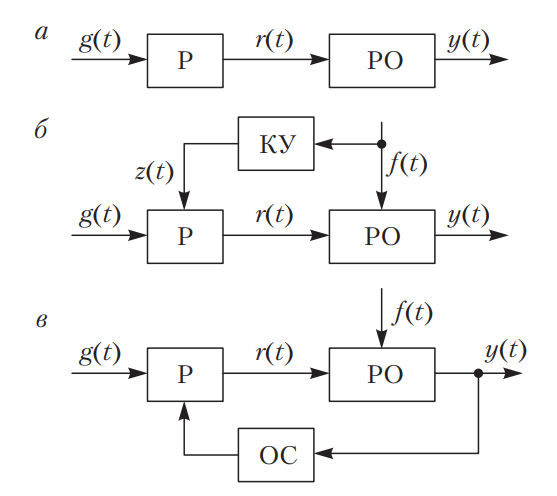
Рис. 1. Функциональные схемы систем безопасности в зависимости от принципа управления: а — разомкнутое управление; б — компенсация; в — обратная связь; РО — регулируемый объект; Р — регулятор; КУ — корректирующее устройство; ОС — обратная связь; g(t) — заданный алгоритм функционирования; f(t) — возмущающее воздействие; y(t) — выходные параметры; z(t) — корректировка алгоритма
Разомкнутое управление (рис. 1, а) реализуется на основе алгоритма g(t), формируемого независимо от обратной связи и параметров выходного сигнала y(t). Такое управление не учитывает ни текущее состояние объекта, ни внешние воздействия. Типичный пример — система зажигания двигателя или ручное торможение водителем.
Принцип компенсации (рис. 1, б) позволяет учитывать влияние внешних факторов, внося корректировку z(t) в базовый алгоритм g(t) посредством корректирующего устройства (КУ). Это позволяет компенсировать изменения в выходных параметрах y(t), вызванные случайным возмущением f(t). Например, регулировка давления в тормозной системе может зависеть от изменения нагрузки на ось, где f(t) = G(t), а y(t) = p(t).
Тем не менее, возмущающее воздействие может носить спонтанный характер, не будучи функцией времени, что делает его сложно предсказуемым. При полуавтоматическом управлении подобную функцию может выполнять водитель, принимая решения на основе текущей обстановки, например, экстренное торможение. В автоматизированных системах компенсация осуществляется корректирующим блоком, фиксирующим изменение f(t).
Принцип обратной связи (рис. 1, в) лежит в основе так называемых следящих систем, к которым относится, например, ABS. Здесь управление формируется на основании измерений выходных параметров y(t), полученных от датчиков, подключенных к блоку обратной связи (ОС). Такая архитектура позволяет оперативно реагировать на отклонения параметров от заданных значений, повышая точность регулирования.
От систем, использующих этот принцип, требуется высокая скорость обработки поступающей информации. Это обусловлено тем, что выходные параметры изменяются с задержкой по сравнению с самим возмущением (например, из-за инерции вращающихся масс или электромагнитных элементов), что ограничивает точность и оперативность регулирования. В результате такие системы работают циклически, но это может сопровождаться нежелательными эффектами, такими как гидроудары в трубопроводах либо перенапряжения от самоиндукции в электромагнитах при их отключении.
Для систем высокого уровня организации часто применяется совмещение всех трёх описанных принципов. Это обеспечивает формирование сбалансированного и оперативного алгоритма управления, компенсируя недостатки каждой схемы в отдельности.
Современные ТС оборудуются множеством систем активной безопасности, работающих автономно и отличающихся по конструктивному исполнению. Их можно классифицировать по назначению:
- системы управления устойчивостью и колесами ТС;
- системы, защищающие водителя и пассажиров;
- технологии защиты пешеходов и других живых объектов;
- системы обеспечения безопасности при движении;
- устройства, обеспечивающие безопасность самого транспортного средства.
Примерами первого типа являются системы ABS, ASR и ESC. Такая классификация облегчает изучение их конструкции и функциональных особенностей, а также значительно упрощает диагностику состояния указанных систем.
Интересные факты:
- Исследования показывают, что наличие ESP в автомобиле снижает вероятность смертельных исходов при ДТП до 50% в ряде сценариев, особенно при заносах и потере сцепления на скользкой дороге.
- В некоторых странах, таких как Канада и США, наличие ABS и ESC стало обязательным требованием для всех новых автомобилей, начиная с 2011 года.
- Современные системы активной безопасности используют искусственный интеллект и машинное обучение. Например, системы автоматического торможения анализируют стиль вождения водителя и адаптируются под него.
- Адаптивный круиз-контроль, один из ассистентов активной безопасности, берет свои корни из космической отрасли — первые сенсоры дистанции были разработаны для спутникового сближения.
Заключение
Системы активной безопасности являются неотъемлемой частью современного транспортного средства. Они не просто дополняют возможности водителя, но и зачастую становятся последним рубежом между безопасной поездкой и аварией. Их развитие идет в ногу с технологиями автоматизации и цифровизации, постепенно приближая нас к эпохе полностью автономного вождения.
Понимание классификации этих систем, принципов их работы и назначения — это не только технически полезная информация, но и важный шаг к формированию культуры безопасного вождения. Интеграция всех трех принципов управления (разомкнутого, компенсационного и с обратной связью) демонстрирует стремление к созданию универсальных, самонастраивающихся решений, минимизирующих влияние человеческого фактора на дорожную обстановку.
Регулярно публикую материалы о передовых методах обработки и сварки материалов, а также освещаю новинки в сфере производства,материаловедения, строительства и др.