Содержание страницы
- 1. Фундамент безопасности: Система курсовой устойчивости (ESC/ESP)
- 2. Интегрированное управление динамикой: Синергия шасси
- 3. Адаптивное рулевое управление: Интеллект в каждом повороте
- 4. Полноуправляемое шасси: Задняя ось вступает в игру
- 5. Адаптивная подвеска: Контроль над кренами и комфортом
- Заключение: Будущее за полной интеграцией
История автомобильной безопасности прошла долгий путь от пассивных элементов, таких как ремни и подушки безопасности, до высокоинтеллектуальных активных систем. Ключевым поворотным моментом стало появление антиблокировочной системы тормозов (ABS), которая впервые позволила электронике вмешиваться в управление автомобилем для предотвращения аварии. Однако настоящая революция произошла с разработкой системы курсовой устойчивости (ESP), которая научилась бороться с заносами и сносами, фактически став «ангелом-хранителем» для миллионов водителей. Сегодня мы наблюдаем следующий этап эволюции: объединение всех систем управления шасси в единую нейросеть, способную комплексно контролировать динамику автомобиля в любых условиях. Эта статья подробно рассматривает архитектуру, принципы работы и ключевые компоненты современных систем стабилизации.
1. Фундамент безопасности: Система курсовой устойчивости (ESC/ESP)
Система курсовой устойчивости, известная под аббревиатурами ESC (Electronic Stability Control) или ESP (Electronic Stability Program), является основой для всех современных комплексов управления динамикой. Ее основная задача — сохранение траектории движения, заданной водителем, путем своевременного обнаружения и подавления сноса передней оси (недостаточная поворачиваемость) или заноса задней оси (избыточная поворачиваемость).
Используя данные с датчиков угловой скорости (гироскопа), поперечного ускорения, скорости вращения колес и угла поворота руля, система в реальном времени сравнивает фактическое поведение автомобиля с намерениями водителя. При выявлении расхождения ESP мгновенно и избирательно подтормаживает одно или несколько колес, создавая корректирующий момент, который возвращает автомобиль на заданную траекторию.
Эффективность этой технологии подтверждена многочисленными исследованиями. По данным Daimler AG, внедрение ESP в серийное производство привело к снижению аварий из-за потери контроля над автомобилем на 42%. Американская национальная администрация безопасности дорожного движения (NHTSA) приводит схожую цифру в 35%, отмечая также снижение смертности в таких ДТП на 30%. Это доказывает, что ESP является одной из самых значимых инноваций в области активной безопасности за последние десятилетия.
Следует отметить, что процедуры испытаний и оценки эффективности подобных систем в Российской Федерации регламентируются профильными стандартами, таким как ГОСТ Р 41.36-2004 — «Транспорт дорожный. Диагностика бортовая. Общие технические требования».
2. Интегрированное управление динамикой: Синергия шасси
Объединение различных электронных систем автомобиля в единую сеть через высокоскоростные шины данных (например, CAN) позволило перейти от разрозненных ассистентов к концепции интегрированного управления. На этом принципе построены системы нового поколения, которые координируют работу не только тормозов, но и рулевого управления, трансмиссии и подвески.
Такой комплексный подход направлен на достижение сразу нескольких целей: поддержание максимальной курсовой устойчивости, повышение маневренности и управляемости, а также снижение физической и психоэмоциональной нагрузки на водителя. Технически это реализуется через специализированное программное обеспечение, чаще всего интегрированное в блок управления ESP. Хотя такие системы не всегда имеют собственные уникальные компоненты, они представляют собой высший уровень логического управления шасси. Ведущие производители используют для них собственные маркетинговые наименования:
- VDM (Vehicle Dynamics Management) — разработка Robert Bosch GmbH;
- VDIM (Vehicle Dynamics Integrated Management) — используется Toyota Motor Corporation;
- ICM (Integrated Chassis Management) — применяется в автомобилях BMW AG.
3. Адаптивное рулевое управление: Интеллект в каждом повороте
Одним из ключевых исполнительных механизмов в интегрированных системах является динамическое или активное рулевое управление. Его появление было продиктовано необходимостью устранить компромисс традиционных механизмов с постоянным передаточным отношением, которые не могут быть одинаково эффективными и при парковке, и при движении на высокой скорости по автомагистрали.
3.1. Принцип работы и задачи
Динамическое рулевое управление изменяет передаточное отношение в зависимости от скорости движения и угла поворота руля. На парковке оно делает руль «острым» (меньше оборотов от упора до упора), а на трассе — «тяжелым» и менее чувствительным, обеспечивая стабильность. Но главная его ценность — в интеграции с ESP. Система способна самостоятельно «подруливать» колесами для стабилизации автомобиля, зачастую делая это быстрее и точнее водителя, и минимизируя необходимость вмешательства тормозной системы.
Рассмотрим две классические ситуации:
- Избыточная поворачиваемость (занос): Возникает, например, при резкой смене полосы. Когда задняя ось начинает «уходить» в занос, система автоматически поворачивает передние колеса в сторону заноса на небольшой угол, парируя его в самом начале развития. Водителю остается лишь удерживать руль в направлении желаемой траектории.
- Торможение на миксте (μ-split): «Микст» — это дорожное покрытие с разным коэффициентом сцепления под левыми и правыми колесами (например, асфальт и лед). При торможении возникает разворачивающий момент, который тянет машину в сторону лучшего сцепления. Динамическое рулевое управление мгновенно создает компенсирующий угол поворота колес, удерживая автомобиль на прямой траектории без участия водителя. Это не только повышает безопасность, но и сокращает тормозной путь.
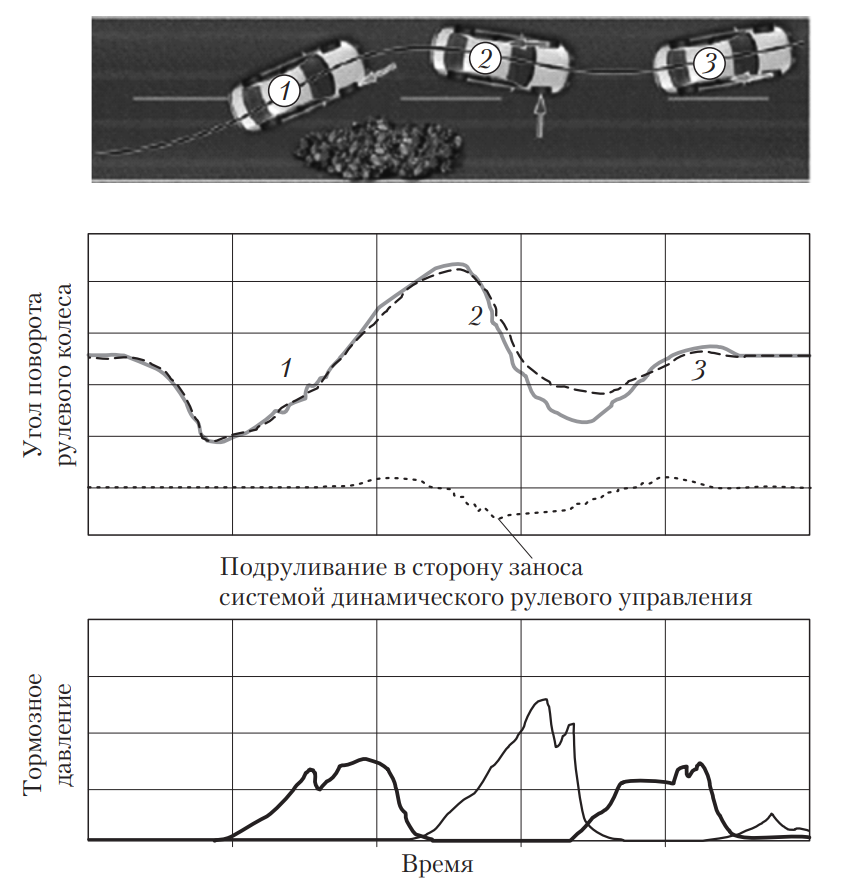
Рис. 1. Схема стабилизации автомобиля при избыточной поворачиваемости с помощью динамического рулевого управления: 1, 2, 3 — фазы стабилизации; ____ — угол поворота управляемого колеса; —- — угол поворота рулевого колеса; …. — угол подруливания, созданный системой; ‾‾‾ — давление в тормозных механизмах.
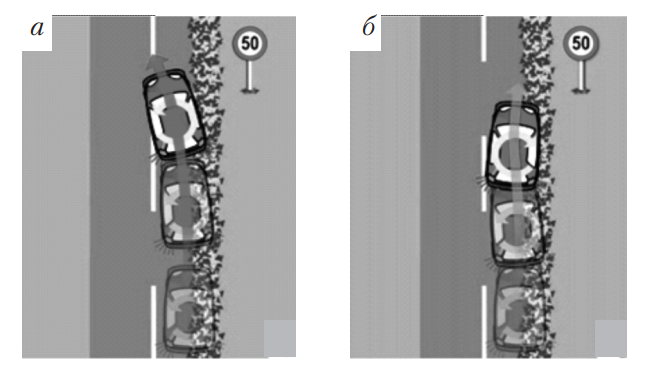
Рис. 2. Сравнение траекторий при торможении на миксте: а) без систем помощи, возможны ошибки водителя и раскачивание; б) с ассистентом рулевой коррекции, траектория стабильна, тормозной путь короче.
3.2. Технические реализации
Производители используют различные конструкции для реализации активного рулевого управления. Наиболее распространены два типа:
Реечный электроусилитель с двойной шестерней (Audi)
В этой конструкции на рулевую рейку воздействуют две шестерни. Первая приводится непосредственно рулевым валом от водителя, а вторая — отдельным электродвигателем. Блок управления, анализируя данные о скорости, угле поворота и других параметрах, подает команду на второй электродвигатель, который добавляет или вычитает угол поворота, корректируя действия водителя или действуя автономно.
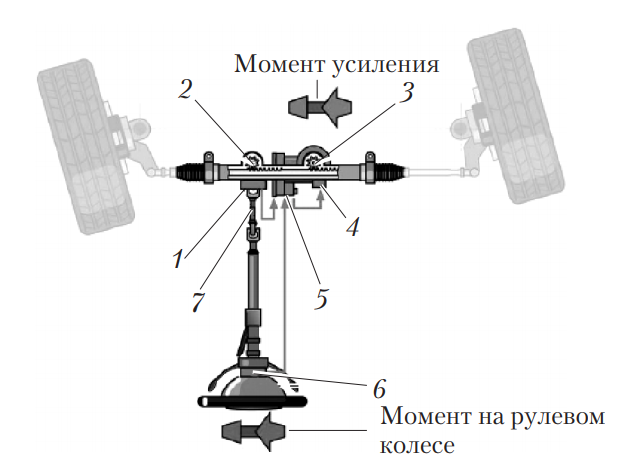
Рис. 3. Принципиальная схема реечного электроусилителя с двумя шестернями: 1 — датчик момента; 2, 3 — ведущие шестерни; 4 — электродвигатель; 5 — блок управления; 6 — датчик угла поворота; 7 — торсион.
Более современные версии используют коаксиальное расположение электродвигателя вокруг рейки с шарико-винтовой передачей, что делает узел более компактным и эффективным.
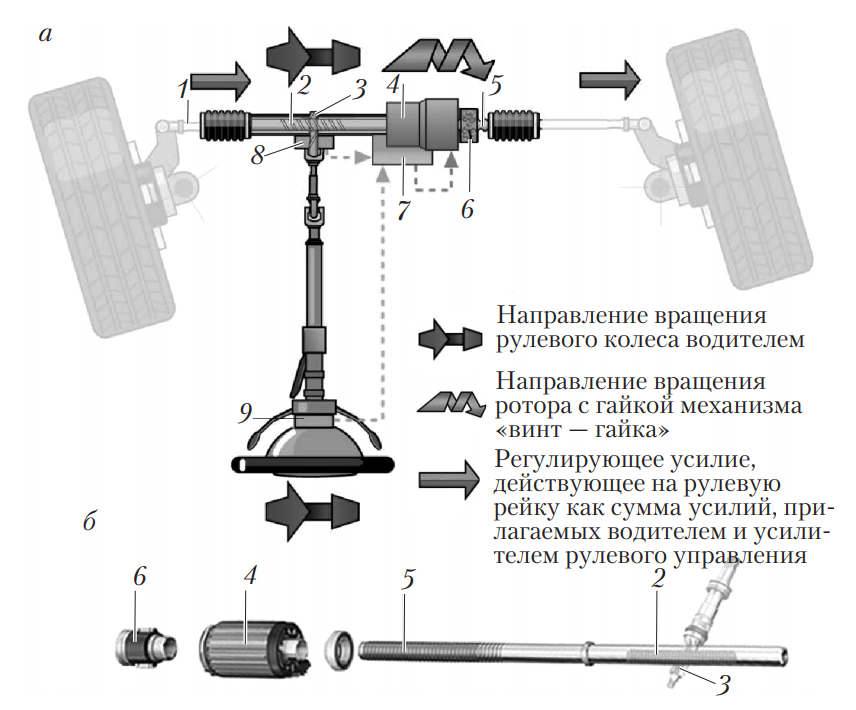
Рис. 4. Электроусилитель с коаксиальным расположением двигателя: а — общая схема; б — детали; 1 — тяга; 2 — зубчатая часть; 3 — вал-шестерня; 4 — электродвигатель; 5 — ходовой винт; 6 — гайка с циркулирующими шариками; 7 — блок управления; 8 — датчик момента; 9 — датчик угла поворота.
Суммирующий механизм с волновым редуктором (Audi)
Это более сложная и точная система. В разрез рулевого вала встраивается волновой редуктор. Его особенность — наличие гибкого элемента, который деформируется под воздействием вращения от электродвигателя, создавая разницу в угловых скоростях между рулем и рулевым механизмом. Такая конструкция позволяет передавать очень большой крутящий момент при компактных размерах и обеспечивает высокую точность подруливания.
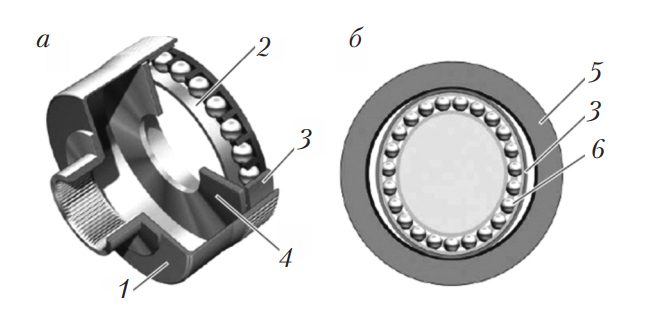
Рис. 5. Конструкция волнового редуктора: а — общий вид; б — схема; 1 — корпус; 2 — внутреннее эксцентрическое кольцо подшипника (генератор волн); 3 — наружное гибкое кольцо; 5 — колесо с внутренним зубчатым венцом.
Суммирующий механизм с планетарным редуктором (BMW)
Конкурирующая технология от BMW использует сдвоенный планетарный редуктор, также встроенный в рулевой вал. Электродвигатель вращает корпус редуктора (эпициклическую шестерню), что позволяет суммировать или вычитать угол поворота. В зависимости от направления вращения мотора, передаточное отношение рулевого механизма изменяется в широком диапазоне (например, от 10:1 на парковке до 20:1 на высокой скорости), обеспечивая оптимальную «остроту» руля в любой ситуации.
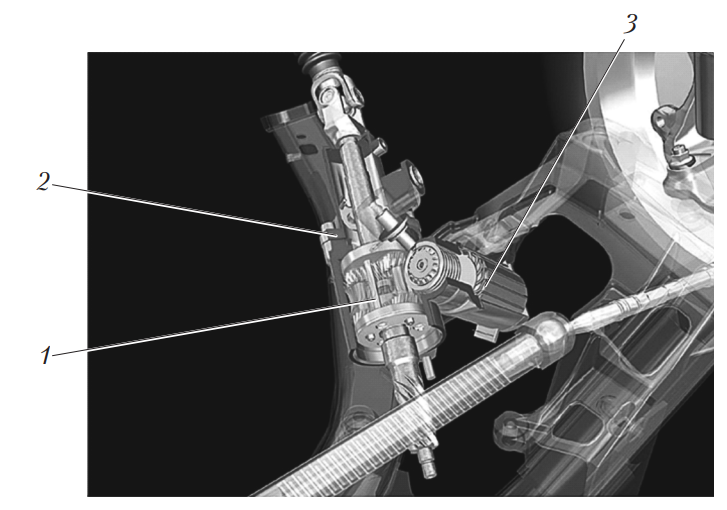
Рис. 6. Электромеханический привод активного рулевого управления BMW: 1 — планетарный редуктор; 2 — корпус редуктора; 3 — электродвигатель.
4. Полноуправляемое шасси: Задняя ось вступает в игру
Вершиной развития систем управления динамикой является внедрение управляемой задней оси (4WS – 4 Wheel Steering). Эта технология кардинально улучшает маневренность и стабильность автомобиля, работая в двух режимах:
- На низких скоростях (до ~60 км/ч): Задние колеса поворачиваются в сторону, противоположную передним, на небольшой угол (обычно до 3-5°). Это виртуально «укорачивает» колесную базу, значительно уменьшая радиус поворота. Автомобиль становится невероятно маневренным в городских условиях и на парковках.
- На высоких скоростях: Задние колеса поворачиваются в ту же сторону, что и передние. Это создает эффект «перестроения крабом», когда автомобиль смещается в соседнюю полосу более плавно, без рыскания. Виртуальное «удлинение» колесной базы резко повышает курсовую устойчивость при резких маневрах.
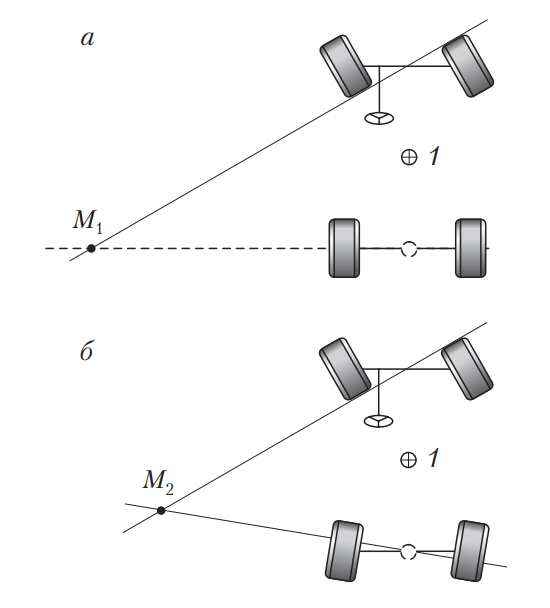
Рис. 7. Эффект подруливания задних колес на низких скоростях: а — традиционная схема; б — с подворотом задних колес. Мгновенный центр вращения (M) смещается к центру автомобиля, уменьшая радиус поворота.
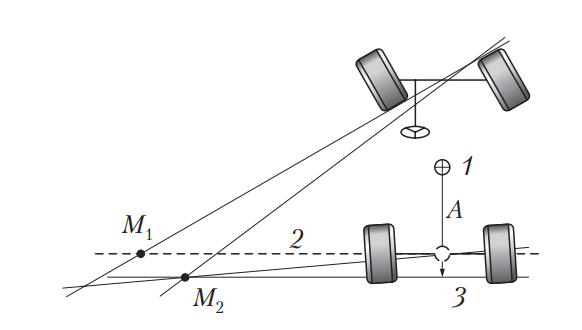
Рис. 8. Эффект подруливания задних колес на высоких скоростях: Задние колеса поворачиваются в одном направлении с передними, виртуально удлиняя колесную базу (A) и повышая стабильность.
Исполнительные механизмы для поворота задних колес обычно представляют собой компактный электродвигатель с винтовой или планетарной передачей, который воздействует на рулевые тяги задней оси. Такие системы, как на Toyota Aristo или современных моделях BMW, полностью управляются электроникой и интегрированы в общую систему управления динамикой.
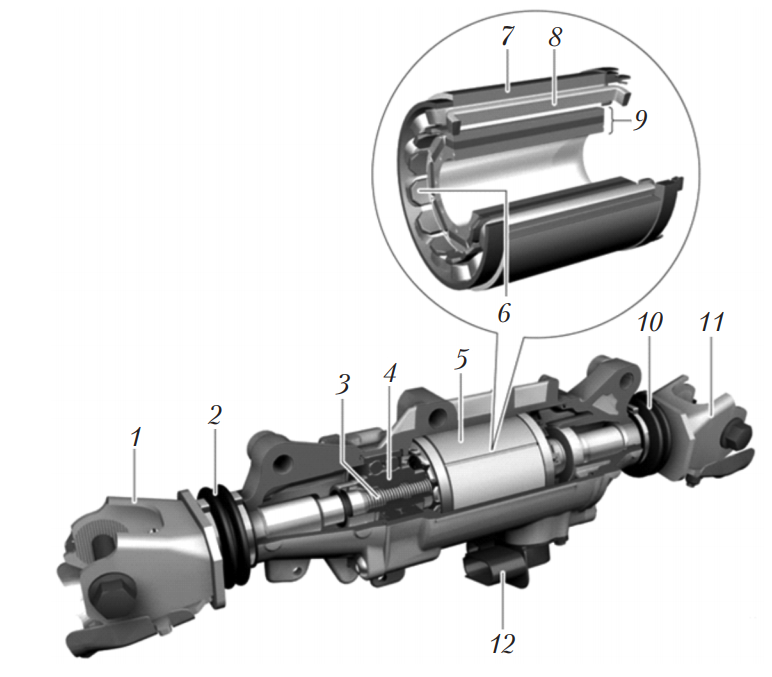
Рис. 9. Электромеханический исполнительный механизм поворота задней оси (на примере BMW): 3 — винтовой вал; 4 — гайка; 5 — электродвигатель; 1, 11 — точки крепления рычагов.
5. Адаптивная подвеска: Контроль над кренами и комфортом
Третьим столпом интегрированного управления шасси является адаптивная подвеска, которая позволяет активно бороться с кренами в поворотах, «клевками» при торможении и «приседаниями» при разгоне. Это достигается за счет управления двумя ключевыми элементами: упругими элементами и амортизаторами.
5.1. Пневматическая подвеска и управление клиренсом
Вместо традиционных стальных пружин в таких системах используются пневматические упругие элементы (пневмобаллоны). Компрессор нагнетает в них сжатый воздух, что позволяет не только поддерживать постоянный дорожный просвет (клиренс) независимо от загрузки, но и изменять его по команде водителя или автоматически.
Например, на высоких скоростях система может опускать кузов для улучшения аэродинамики и устойчивости, а на бездорожье — поднимать для увеличения проходимости. За положением кузова следят специальные датчики высоты на каждом колесе.
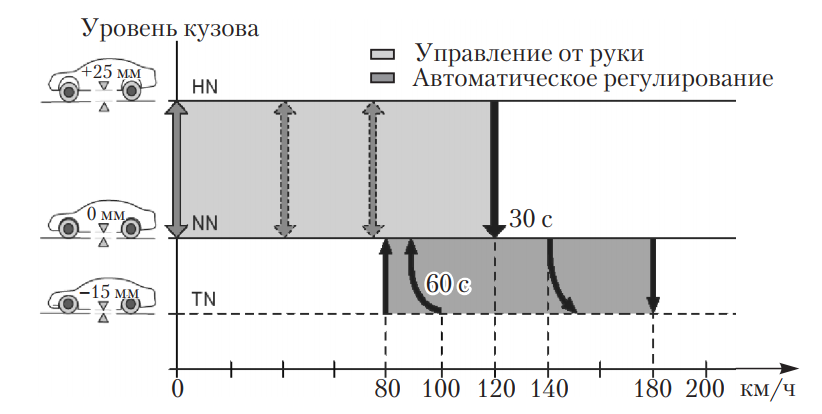
Рис. 10. Алгоритм автоматического изменения уровня кузова (на примере Volkswagen Phaeton): HN — повышенный уровень; NN — номинальный; TN — пониженный. Уровень меняется в зависимости от скорости движения.
5.2. Адаптивные амортизаторы и стратегия «Skyhook»
Ключевую роль в управляемости играет электронная система управления демпфированием (например, CDC — Continuous Damping Control). Внутри каждого амортизатора установлен электромагнитный клапан, который за миллисекунды способен изменить сечение каналов для перетекания гидравлической жидкости. Это позволяет мгновенно делать амортизатор «мягким» или «жестким».
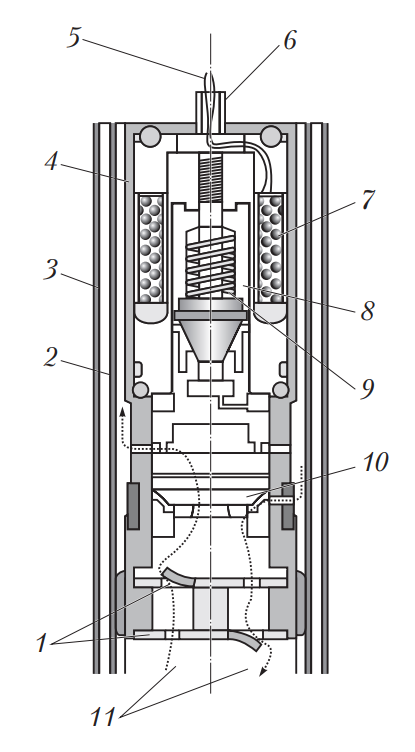
Рис. 11. Конструкция амортизатора с регулируемым демпфированием: 7 — обмотка электромагнитного клапана; 10 — главный клапан; 11 — потоки рабочей жидкости. Изменяя ток в обмотке, система регулирует сопротивление.
Управление осуществляется по так называемой стратегии «Skyhook» (небесный крюк). Система, основываясь на данных датчиков ускорения кузова и колес, стремится поддерживать кузов в максимально стабильном положении, как будто он «подвешен к небу», в то время как колеса отрабатывают все неровности дороги. Это обеспечивает высочайший уровень комфорта и одновременно минимизирует крены, улучшая сцепление шин в поворотах.
Заключение: Будущее за полной интеграцией
Современные системы стабилизации и управления динамикой превратили автомобиль из набора механических узлов в сложный кибернетический организм. Интеграция рулевого управления, тормозов, трансмиссии и подвески под управлением единого электронного «мозга» позволяет достичь уровня безопасности и управляемости, который был немыслим еще 15-20 лет назад. Дальнейшее развитие этих технологий лежит в плоскости предиктивного управления, когда автомобиль, используя данные навигации, камер и радаров, сможет заранее адаптировать настройки шасси к предстоящему повороту или изменению дорожного покрытия, делая движение еще более безопасным, комфортным и эффективным.
