В эволюции автомобильной безопасности переход от пассивных систем (ремни, подушки безопасности) к активным стал революционным скачком, направленным не на смягчение последствий ДТП, а на его предотвращение. Системы курсовой устойчивости, известные под аббревиатурой ESP (Electronic Stability Programme), являются вершиной этой концепции. Их основная задача — сохранение контроля над автомобилем в критических ситуациях путем интеллектуального вмешательства в управление, когда водитель рискует потерять контроль. Система в реальном времени анализирует динамику движения и корректирует траекторию, предотвращая занос или снос.
Исторически идея стабилизации автомобиля зародилась вместе с разработкой антиблокировочных систем (ABS). Инженеры поняли, что контроль над вращением колес можно использовать не только для предотвращения их блокировки при торможении. Первые шаги были сделаны в виде антипробуксовочных систем (ASR/TCS), которые предотвращали пробуксовку ведущих колес при разгоне. Логическим развитием стало объединение этих систем в единый комплекс, способный управлять каждым колесом индивидуально не только в продольном, но и в поперечном направлении. Прорыв произошел в 1995 году, когда компании Bosch и Mercedes-Benz представили первую в мире серийную систему ESP на модели Mercedes-Benz S-Class (W140). Однако широкую известность и признание система получила после знаменитого «лосиного теста» 1997 года, когда компактный Mercedes-Benz A-Class перевернулся при выполнении резкого маневра. В ответ компания отозвала все проданные автомобили и в срочном порядке оснастила их системой ESP, которая успешно решила проблему устойчивости. Этот инцидент стал мощнейшим катализатором для внедрения ESP в массовое производство.
Сегодня эффективность ESP признана на глобальном уровне. Исследования, проведенные ведущими институтами безопасности, такими как IIHS (Страховой институт дорожной безопасности США), показали, что наличие ESP снижает риск аварий с одним транспортным средством на 40-50%. Это привело к тому, что с 2011-2012 годов оснащение всех новых легковых автомобилей системами курсовой устойчивости стало обязательным требованием в США, Канаде, странах Европейского союза, Австралии и многих других странах. Эта технология перешла из разряда дорогостоящих опций в стандартное оборудование, спасающее тысячи жизней ежегодно.
1. Архитектура и принцип функционирования базовой системы ESP
Система курсовой устойчивости представляет собой сложный программно-аппаратный комплекс, интегрированный в бортовую электронику автомобиля. Она является системой активной безопасности более высокого уровня и по своей сути надстраивается над уже существующими системами, такими как антиблокировочная система тормозов (ABS), система распределения тормозных усилий (EBD) и антипробуксовочная система (ASR или TCS), используя их компоненты и расширяя их функционал.
Принципиальное отличие ESP от ABS заключается в проактивном характере ее работы. Если ABS активируется только в момент интенсивного торможения по команде водителя, то ESP осуществляет непрерывный мониторинг динамических параметров автомобиля, более 25 раз в секунду сравнивая намерения водителя с фактическим поведением машины. Система учитывает три основные степени свободы автомобиля на плоскости дороги: продольное движение, поперечное движение и вращение вокруг вертикальной оси (рыскание).
1.1. Компонентная база системы
Конструктивно ESP использует множество узлов, общих с ABS и ASR, но дополняется рядом уникальных высокоточных датчиков и более производительным блоком управления. Рассмотрим общую компоновку на примере системы, показанной на рисунке 1.
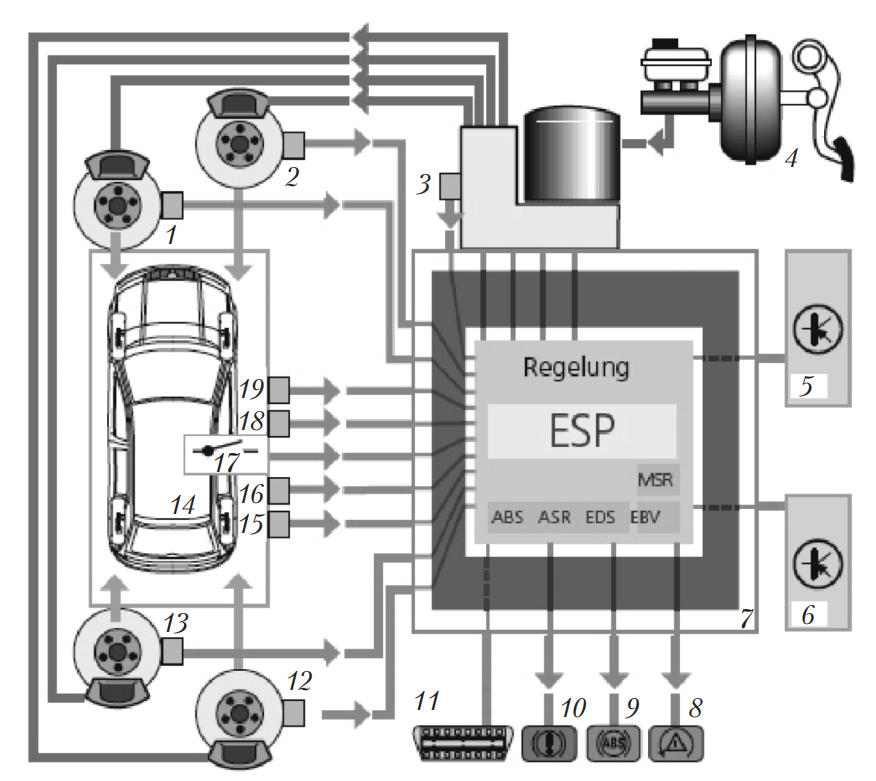
Рис. 1. Общая компоновка электронной системы курсовой устойчивости ESP (на примере Skoda Fabia): 1, 2, 12, 13 — датчики частоты вращения колес; 3 — датчик давления в тормозной системе; 4 — активный усилитель тормозной системы; 5 — ЭБУ работой двигателя; 6 — ЭБУ работой коробки передач (только на моделях с автоматической коробкой передач); 7 — гидравлический блок с блоком управления ABS/EDL/TCS/ESP; 8 — контрольная лампа TCS/ESP; 9 — контрольная лампа ABS; 10 — контрольная лампа двухконтурной тормозной системы и стояночного тормоза; 11 — диагностический разъем; 14 — система динамики автомобиля и поведения водителя; 15 — выключатель стоп-сигнала; 16 — датчик угла поворота рулевого колеса; 17 — кнопочный выключатель систем TCS/ESP; 18 — датчик рыскания; 19 — датчик бокового ускорения.
Ключевыми элементами системы являются:
- Входные датчики: Это «органы чувств» системы. Они фиксируют действия водителя и параметры движения автомобиля, преобразуя их в электрические сигналы. К ним относятся датчики скорости вращения колес (1, 2, 12, 13), датчик угла поворота рулевого колеса (16), датчик угловой скорости (рыскания) (18), датчик поперечного (бокового) ускорения (19) и датчик давления в тормозной системе (3).
- Электронный блок управления (ЭБУ): Это «мозг» системы. Он интегрирован в гидравлический блок (7). ЭБУ непрерывно получает и обрабатывает сигналы от всех датчиков, а также обменивается данными по CAN-шине с блоком управления двигателем (5) и блоком управления АКПП (6). На основе сложного математического алгоритма ЭБУ сравнивает заданную водителем траекторию с реальной и при их расхождении формирует управляющие воздействия.
- Исполнительные механизмы: Это «мышцы» системы. Главным исполнительным устройством является гидравлический модулятор (гидроблок), который является частью блока (7). Он способен создавать и сбрасывать давление в тормозном контуре любого колеса индивидуально, без нажатия водителем педали тормоза. Также к исполнительным механизмам относится система управления двигателем, которой ЭБУ может дать команду на снижение крутящего момента.
1.2. Алгоритм работы и сценарии вмешательства
Алгоритм работы ESP основан на постоянном сравнении двух ключевых параметров: желаемой траектории и фактической траектории.
- Определение желаемой траектории: Система определяет намерения водителя по двум основным датчикам — датчику угла поворота рулевого колеса (16) и датчику положения педали акселератора (информация поступает от ЭБУ двигателя 5). Эти данные позволяют блоку управления понять, куда и с какой интенсивностью водитель хочет направить автомобиль.
- Определение фактической траектории: Реальное поведение автомобиля вычисляется на основе данных от датчиков угловой скорости (рыскания) (18), бокового ускорения (19) и индивидуальных скоростей вращения колес (1, 2, 12, 13). Датчик рыскания измеряет скорость поворота автомобиля вокруг своей вертикальной оси, а датчик бокового ускорения — величину боковых сил, действующих на кузов.
- Сравнение и принятие решения: ЭБУ ESP с частотой до 150 раз в секунду сравнивает вычисленную желаемую траекторию с фактической. Если обнаруживается значимое расхождение, система расценивает это как начало потери управляемости (занос или снос) и немедленно вмешивается.
Вмешательство системы (стабилизация) может осуществляться несколькими способами одновременно:
- Подтормаживание определенных колес: Это основной и наиболее эффективный инструмент ESP. Создавая тормозное усилие на одном или нескольких колесах, система генерирует корректирующий момент, который противодействует заносу и возвращает автомобиль на заданную траекторию.
- Изменение крутящего момента двигателя: Если подтормаживания колес недостаточно или система определяет, что причиной нестабильности является избыточная тяга, ЭБУ ESP отправляет по CAN-шине команду блоку управления двигателем на уменьшение крутящего момента. Это может быть реализовано через изменение положения дроссельной заслонки, пропуски впрыска топлива или зажигания, или изменение угла опережения зажигания.
- Воздействие на трансмиссию: На автомобилях с АКПП система может запретить переключение на пониженную передачу, чтобы избежать резкого роста крутящего момента на ведущих колесах.
- Взаимодействие с активным рулевым управлением и адаптивной подвеской: В более продвинутых системах ESP может изменять угол поворота колес (независимо от водителя) или жесткость амортизаторов для достижения максимальной стабильности.
Цикл управления завершается, как только фактическая траектория движения совпадает с желаемой. Если стабильность не восстановлена, цикл немедленно повторяется. Водитель информируется о работе системы миганием контрольной лампы ESP на приборной панели.
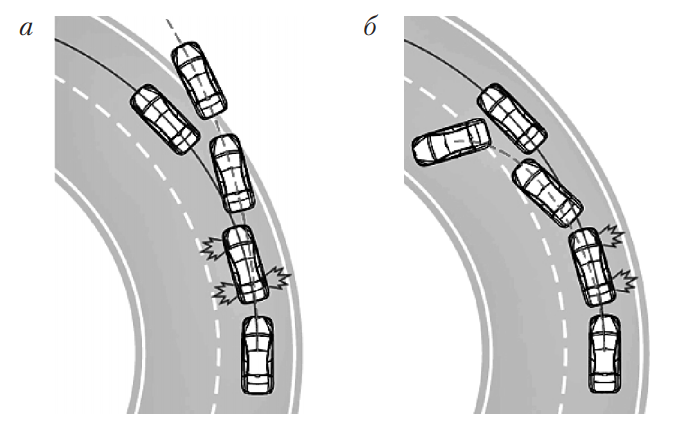
Рис. 2. Траектория движения на повороте с ESP (сплошная линия) и без ESP (прерывистая линия): а — недостаточная поворачиваемость; б — избыточная поворачиваемость
Рассмотрим два классических сценария потери устойчивости:
- Недостаточная поворачиваемость (снос передней оси): Возникает, когда автомобиль не вписывается в поворот и скользит передними колесами наружу (рис. 2, а). Это характерно для переднеприводных автомобилей при превышении скорости в повороте. ESP распознает эту ситуацию и для коррекции кратковременно притормаживает внутреннее заднее колесо. Это создает момент рыскания, который «заправляет» автомобиль в поворот.
- Избыточная поворачиваемость (занос задней оси): Проявляется, когда задняя часть автомобиля начинает опережать переднюю, и автомобиль стремится развернуться (рис. 2, б). Это типично для заднеприводных автомобилей. Для стабилизации ESP притормаживает внешнее переднее колесо, что создает противодействующий момент, гасящий занос и выравнивающий автомобиль.
1.3. Преимущества и недостатки систем курсовой устойчивости
Как и любая сложная технология, ESP имеет свои сильные и слабые стороны.
Преимущества:
- Значительное повышение безопасности: Основное и неоспоримое преимущество. ESP эффективно предотвращает заносы и сносы, сохраняя контроль над автомобилем в ситуациях, где среднестатистический водитель был бы бессилен.
- Коррекция ошибок водителя: Система способна исправить неверные действия водителя, такие как слишком высокая скорость в повороте, резкий маневр или неправильная реакция на начавшийся занос.
- Уверенность на скользком покрытии: ESP вселяет в водителя больше уверенности при движении в сложных погодных условиях (дождь, снег, лед), хотя и не отменяет необходимости соблюдать осторожность.
- Многофункциональность: На аппаратной базе ESP реализуется множество полезных вспомогательных функций (рассмотрены ниже), что делает автомобиль в целом более комфортным и безопасным.
Недостатки и ограничения:
- Снижение проходимости в специфических условиях: В глубоком снегу, грязи или на песке для движения «в раскачку» или с пробуксовкой может потребоваться отключение системы. ESP, расценивая пробуксовку как потерю сцепления, будет «душить» двигатель и подтормаживать колеса, мешая автомобилю выехать. Именно для таких случаев в большинстве автомобилей предусмотрена кнопка отключения ESP (или ее антипробуксовочного компонента TCS).
- Иллюзия вседозволенности: Некоторые водители могут переоценивать возможности системы и собственного автомобиля, что приводит к более рискованному стилю вождения. Важно помнить, что ESP не может преодолеть законы физики. Если скорость слишком высока, и сцепление шин с дорогой полностью потеряно, система будет бессильна.
- Сложность и стоимость ремонта: Выход из строя любого из компонентов системы (особенно ЭБУ, гидроблока или датчика рыскания) может привести к дорогостоящему ремонту. Диагностика требует специального оборудования.
- Зависимость от состояния шин и подвески: Эффективность ESP напрямую зависит от состояния шин и исправности подвески. Система не сможет корректно работать на «лысой» резине или с изношенными амортизаторами.
1.4. Сравнение поколений систем ESP
С момента своего появления в 1995 году система ESP прошла несколько этапов эволюции, становясь быстрее, точнее и функциональнее.
| Поколение/Характеристика | ESP 1-5 (1995-2002) | ESP 8 (2002-2010) | ESP 9 (с 2010) |
|---|---|---|---|
| Производительность ЭБУ | Относительно низкая, базовые алгоритмы. | Значительно увеличена, более сложные алгоритмы, интеграция с другими системами. | Высокопроизводительные двухъядерные процессоры, предиктивные алгоритмы. |
| Скорость реакции | Удовлетворительная. | Высокая. Насос гидроблока создает давление быстрее. | Практически мгновенная. Модульная конструкция, более точное управление давлением. |
| Масса и габариты гидроблока | ~4.3 кг | ~2.9 кг | ~1.6 — 2.2 кг |
| Дополнительные функции | Минимальный набор (ABS, EBD, ASR). | Расширенный набор: Brake Assist, Hill Hold Control, Trailer Stability. | Максимальный набор, включая интеграцию с адаптивным круиз-контролем, системами предотвращения столкновений. |
| Датчики | Раздельные датчики рыскания и бокового ускорения. | Часто объединены в один «сенсорный кластер» (IMU). | Высокоточные MEMS-датчики, интегрированные в единый модуль IMU. Повышенная точность и надежность. |
2. Дополнительные функции на базе системы курсовой устойчивости
Современная ESP — это не просто система стабилизации, а целая платформа, на которой программно реализуется множество вспомогательных подсистем. Они не требуют установки дополнительных конструктивных элементов, а являются расширением программного обеспечения основного блока управления, используя уже имеющиеся датчики и исполнительные механизмы.
2.1. Система стабилизации торможения в повороте (Cornering Brake Control, CBC)
При торможении в повороте происходит перераспределение веса автомобиля: внешние колеса нагружаются, а внутренние — разгружаются. Это может привести к потере сцепления и развитию опасных явлений, таких как снос или занос. CBC предназначена для предотвращения этого. Система асимметрично распределяет тормозные усилия между колесами левой и правой стороны. При торможении в повороте CBC снижает тормозное давление на внутреннем переднем колесе и увеличивает на внешних, создавая стабилизирующий «противомомент». Это позволяет сохранить управляемость и курсовую устойчивость даже при экстренном торможении в вираже. Особенность CBC в том, что для своей работы ей не всегда требуются данные от датчиков рыскания; она может распознавать ситуацию, анализируя разницу в угловых скоростях вращения колес.
2.2. Системы управления распределением крутящего момента
Эти системы направлены на улучшение тяговых характеристик и управляемости автомобиля путем активного перераспределения крутящего момента между ведущими колесами.
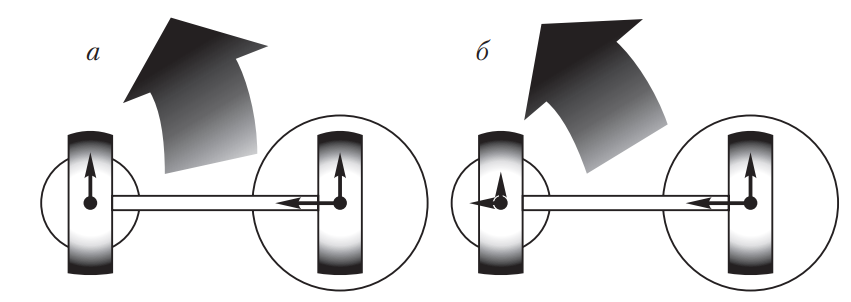
Рис. 3. Распределение сил на колесах автомобиля при повороте: а — обычного автомобиля; б — автомобиля с системой активного распределения крутящего момента.
Как видно из рисунка 3, при повороте внутреннее колесо разгружается, и его способность передавать тяговое и боковое усилие падает. Стандартный дифференциал в этой ситуации передаст на него столько же (или даже больше) момента, что приведет к пробуксовке. Системы распределения момента решают эту проблему.
2.2.1. Электронная блокировка дифференциала (Electronic Differential Lock, EDS/XDS)
EDS — это программная имитация механической блокировки дифференциала. Она предназначена для предотвращения пробуксовки одного из ведущих колес при старте, разгоне на неоднородном покрытии или в поворотах. Когда датчики скорости фиксируют, что одно из ведущих колес начало вращаться значительно быстрее другого (пробуксовывать), система через гидравлический блок ABS/ESP подтормаживает это колесо. За счет свойств дифференциала, крутящий момент на противоположном колесе, имеющем лучшее сцепление с дорогой, возрастает. Это позволяет автомобилю увереннее разгоняться. Работа EDS, как правило, ограничена диапазоном скоростей до 40-80 км/ч, чтобы избежать перегрева тормозов. Система работает циклично, проходя фазы увеличения, удержания и сброса давления.
2.2.2. Система активного распределения крутящего момента (Torque Vectoring)
Это более продвинутая технология, чем EDS. Если EDS борется с уже начавшейся пробуксовкой, то системы Torque Vectoring (например, ATTS у Honda или Active Yaw Control у Mitsubishi) работают проактивно, перераспределяя крутящий момент для улучшения управляемости. В повороте система целенаправленно передает больше крутящего момента на внешнее нагруженное колесо. Это не только предотвращает пробуксовку внутреннего колеса, но и создает дополнительный поворачивающий момент, который помогает «затащить» автомобиль в поворот, делая его поведение более нейтральным и предсказуемым.
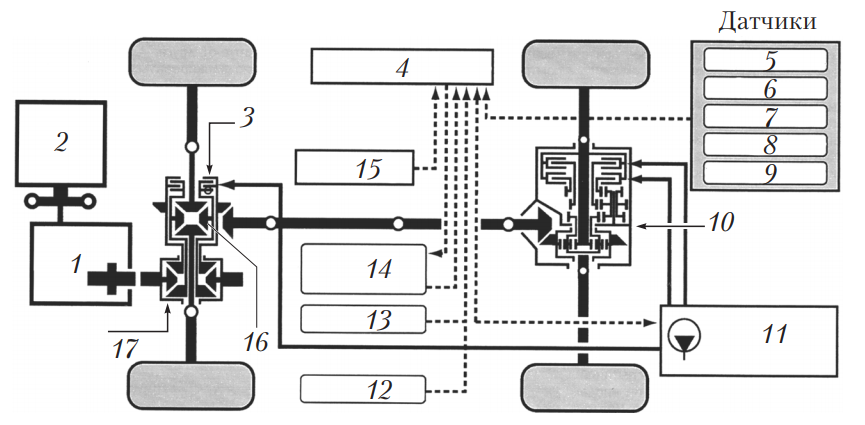
Рис. 4. Схема трансмиссии полноприводного автомобиля Mitsubishi Lancer Evolution VIII: 1 — коробка передач; 2 — двигатель; 3 — муфта блокировки межосевого дифференциала; 4 — БУ дифференциалами; 5 — датчик угла поворота рулевого колеса; 6 — датчик положения дроссельной заслонки; 7 — колесные датчики ABS; 8 — датчики продольного ускорения; 9 — датчики поперечного ускорения; 10 — задний активный дифференциал; 11 — гидронасос с гидроаккумулятором; 12 — лампа стоп-сигнала; 13 — датчик включения стояночного тормоза; 14 — индикатор переключения режимов: асфальт/гравий/снег; 15 — блок управления ABS; 16 — передний дифференциал; 17 — межосевой дифференциал (50:50).
На примере трансмиссии Mitsubishi (рис. 4) видно, как сложная система датчиков (5, 6, 7, 8, 9) собирает информацию, на основе которой ЭБУ (4) управляет активными дифференциалами (10, 17) для оптимального распределения момента не только между осями, но и между задними колесами. При ускорении в повороте до 100% крутящего момента задней оси может быть передано на внешнее колесо (рис. 5).
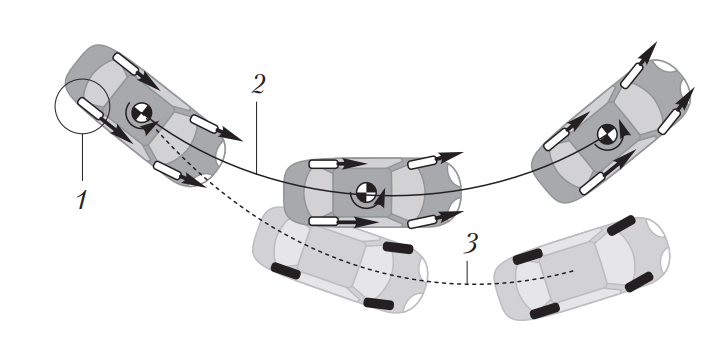
Рис. 5. Траектория движения автомобиля с электронным приводом управляемых колес: 1 — наибольший крутящий момент; 2 — траектория движения автомобиля с электронным приводом управляемых колес; 3 — траектория движения автомобиля без электронного привода управляемых колес.
Реализация таких систем может быть разной. В заднем дифференциале автомобилей Honda (рис. 6) используются электромагнитные многодисковые сцепления (4) и планетарные передачи (2) для управления моментом на каждом из колес.
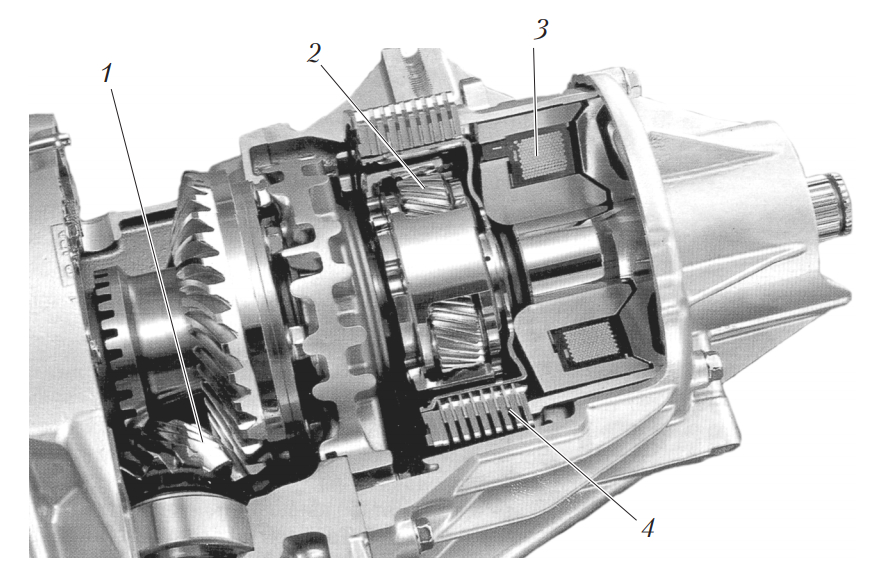
Рис. 6. Привод задних колес с электромагнитным сцеплением: 1 — ведущая шестерня гипоидной передачи; 2 — планетарная передача; 3 — соленоид; 4 — многодисковые сцепления.
2.3. Система стабилизации прицепа (Trailer Stability Assist, TSA)
Движение с прицепом сопряжено с риском возникновения поперечной раскачки («эффект хлыста»), особенно при боковом ветре, на неровной дороге или при резких маневрах. Раскачка прицепа передается на тягач и может привести к полной потере контроля над автопоездом.
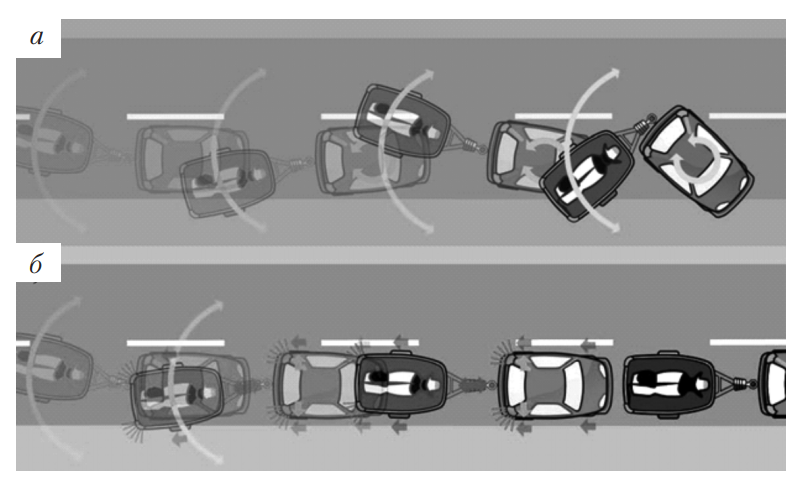
Рис. 7. Схема движения автомобиля с прицепом: а — с раскачкой; б — без раскачки.
TSA — это программное расширение ESP, которое активируется, когда автомобиль распознает подключение прицепа (обычно через разъем электропроводки). Датчики рыскания и бокового ускорения ESP улавливают начинающиеся колебания. Для их подавления система сначала асинхронно подтормаживает передние колеса автомобиля, создавая противодействующий раскачке момент. Если этого недостаточно, TSA снижает крутящий момент двигателя и задействует тормоза всех четырех колес автомобиля, что через тормоз наката замедляет и прицеп, эффективно вытягивая автопоезд в прямую линию и гася колебания.
2.4. Прочие вспомогательные системы
- Система помощи при трогании на подъеме (Hill Hold Control, HHC): Удерживает автомобиль на месте в течение нескольких секунд после того, как водитель отпустил педаль тормоза на уклоне, давая время спокойно перенести ногу на педаль газа и предотвращая откат назад.
- Система предотвращения опрокидывания (Roll Over Mitigation, ROM): Используя датчики ESP, система определяет риск опрокидывания (например, у высокого внедорожника при резком маневре) и вмешивается, притормаживая внешние колеса и снижая тягу двигателя.
- Система очистки тормозных дисков (Brake Disc Wiping): В дождливую погоду система периодически и незаметно для водителя слегка подводит колодки к дискам, удаляя с них водяную пленку и обеспечивая максимальную эффективность торможения в экстренной ситуации.
3. Сенсорные компоненты системы курсовой устойчивости
Точность и быстродействие ESP напрямую зависят от качества данных, получаемых от сенсорных компонентов. Помимо стандартных для ABS датчиков скорости вращения колес, в системе используется ряд специфических высокоточных датчиков, объединенных в единую сеть.
3.1. Датчик угла поворота рулевого колеса
Этот датчик является ключевым для определения намерений водителя. Он измеряет угол, на который повернуто рулевое колесо, направление вращения и угловую скорость. Данные от него используются не только в ESP, но и в адаптивном круиз-контроле, системах удержания в полосе, электроусилителях руля и адаптивном освещении.
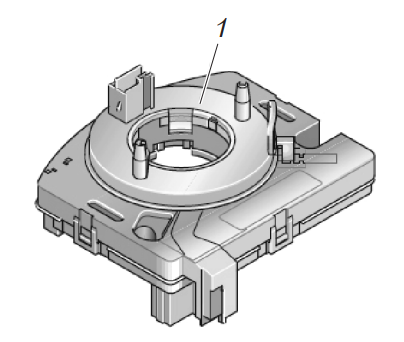
Рис. 8. Датчик угла поворота рулевого колеса: 1 — предохранительное кольцо с часовой пружиной для подушки безопасности.
Датчик устанавливается на рулевой колонке (рис. 8) и должен быть точно откалиброван относительно «нулевого» положения (движение прямо). Существует несколько типов датчиков:
-
- Потенциометрические: Устаревший тип, основанный на изменении сопротивления. Имели низкую надежность из-за наличия скользящих контактов.
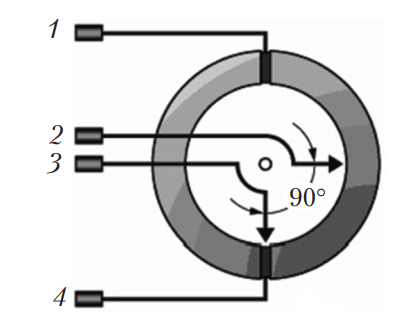
Рис. 9. Потенциометрический датчик угла поворота рулевого колеса: 1 — опорное напряжение; 2, 3 — напряжение на первом и втором скользящих контактах; 4 — «масса».
-
- Оптические: Более современный и надежный бесконтактный тип. Специальный кодирующий диск (2, рис. 10) с прорезями вращается вместе с рулевым валом. Светодиод (6) просвечивает через него на фотоприемник (строчную камеру 5). Анализируя световой поток, электроника (4) с высокой точностью определяет угол и направление поворота.
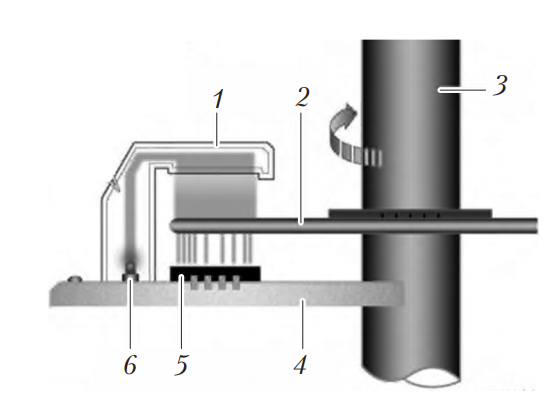
Рис. 10. Оптический датчик угла поворота рулевого колеса: 1 — световод; 2 — кодирующий диск; 3 — рулевая колонка; 4 — плата с электронным блоком обработки; 5 — строчная камера; 6 — светодиод.
-
- Магниторезистивные (GMR/AMR): Наиболее современный тип. Вращение рулевого вала через шестерни передается на постоянные магниты (7, рис. 11). Изменение магнитного поля регистрируется высокочувствительными магниторезистивными элементами (2). Этот тип датчиков очень точен, надежен и компактен.
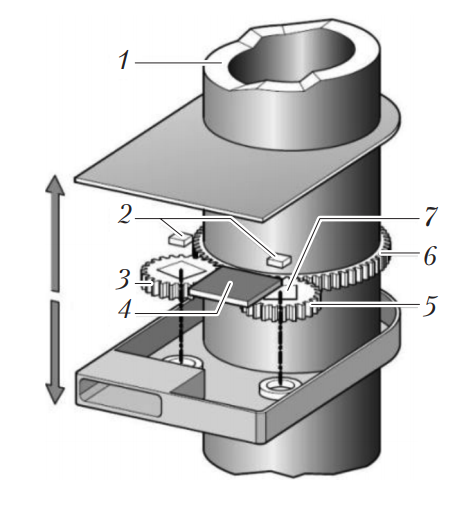
Рис. 11. Магниторезистивный датчик угла поворота рулевого колеса: 1 — рулевая колонка; 2 — элементы магниторезистивного датчика; 3 — измерительная шестерня с m зубьями; 4 — электронная плата; 5 — измерительная шестерня с m = 1 зубьями; 6 — ведущая шестерня; 7 — постоянные магниты.
3.2. Датчик бокового (поперечного) ускорения
Этот датчик измеряет величину центробежной силы, действующей на автомобиль в повороте. Он необходим для определения фактического бокового смещения (сноса) автомобиля. Конструктивно он часто выполнен по технологии MEMS (микроэлектромеханическая система). Упрощенно его принцип можно представить в виде микроскопического конденсатора с подвижной пластиной (массой) (4, рис. 12).
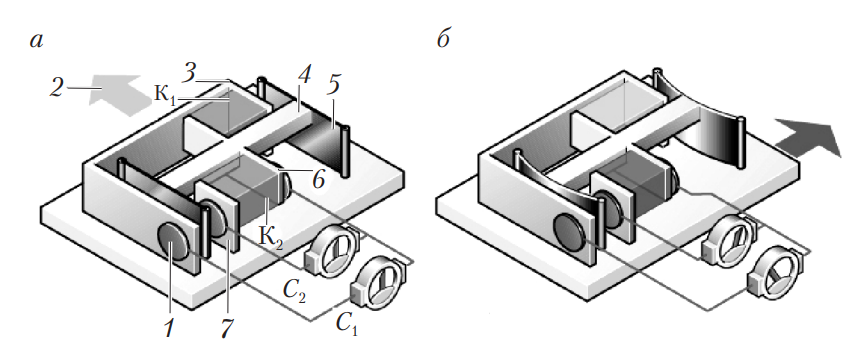
Рис. 12. Датчик бокового ускорения: а — отсутствие ускорений; б — наличие ускорений; 1 — электрод; 2 — направление движения автомобиля; 3, 7 — неподвижные пластинки конденсатора; 4 — подвижная масса; 5 — пружинная пластинка; 6 — пластинка конденсатора на подвижной массе; К1, К2 — конденсаторы; С1, С2 — емкости конденсаторов.
При возникновении бокового ускорения подвижная масса (4) по инерции смещается, изменяя расстояние между пластинами и, соответственно, емкости конденсаторов (С1, С2). Электронная схема измеряет это изменение емкости, которое прямо пропорционально величине бокового ускорения.
3.3. Датчик угловой скорости (рыскания)
Датчик рыскания — это, по сути, миниатюрный гироскоп, который измеряет скорость вращения автомобиля вокруг его вертикальной оси. Это один из важнейших датчиков для определения начинающегося заноса. В современных автомобилях он также построен на технологии MEMS и его работа основана на эффекте Кориолиса.
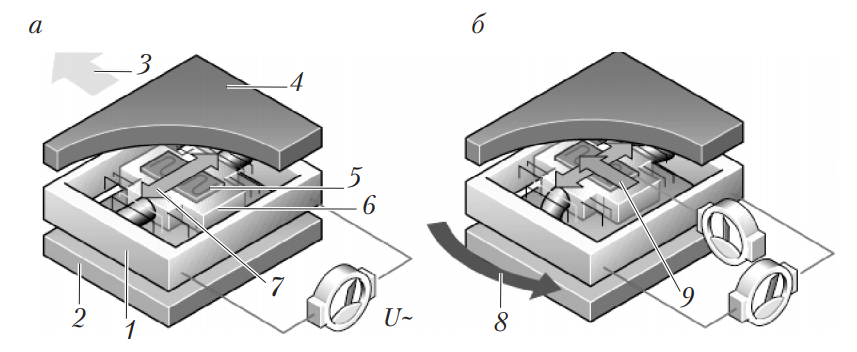
Рис. 13. Датчик рыскания (угловой скорости): 1 — держатель; 2 — южный полюс; 3 — направление движения; 4 — северный полюс; 5 — печатные проводники; 6 — колеблющаяся масса; 7 — прямолинейное колебание под действием переменного напряжения; 8 — угловая скорость; 9 — ускорение в результате действия силы Кориолиса; а — прямолинейное движение; б — движение при угловых ускорениях.
Внутри датчика находится микроскопическая колеблющаяся масса (6), которая приводится в движение переменным напряжением (7). Когда автомобиль начинает поворачиваться (возникает угловая скорость 8), на эту массу начинает действовать сила Кориолиса (9), стремящаяся отклонить ее перпендикулярно основному направлению колебаний. Величина этого отклонения измеряется и преобразуется в сигнал, пропорциональный угловой скорости рыскания.
В современных автомобилях датчики бокового ускорения и рыскания часто конструктивно объединены в один блок — сенсорный кластер или IMU (Inertial Measurement Unit), который устанавливается как можно ближе к центру масс автомобиля (обычно под центральной консолью или под сиденьем водителя).
4. Интересные факты о системах курсовой устойчивости
- Разнообразие названий: Несмотря на то что пионером и основным разработчиком является Bosch с их торговой маркой ESP, многие автопроизводители используют собственные аббревиатуры для обозначения этой системы: ESC (Electronic Stability Control), DSC (Dynamic Stability Control), VSA (Vehicle Stability Assist), VSC (Vehicle Stability Control) и другие. Однако принцип работы у всех этих систем идентичен.
- Спасение жизней: По данным Национального управления безопасностью движения на трассах США (NHTSA), повсеместное внедрение ESP ежегодно предотвращает более трети всех потенциально смертельных ДТП.
- Эволюция тормозов: Для корректной работы ESP потребовалась серьезная эволюция тормозных систем. Гидравлические блоки должны уметь не только сбрасывать давление (как в ABS), но и самостоятельно его создавать с помощью насоса высокого давления, причем делать это очень быстро и точно.
- Не только для автомобилей: Технология стабилизации, аналогичная ESP, с 2016 года стала обязательной и для мотоциклов в ЕС (под названием MSC — Motorcycle Stability Control). Она учитывает еще и угол наклона мотоцикла, предотвращая срыв колес при торможении и разгоне в повороте.
- Отключение «для дрифта»: На спортивных и «заряженных» автомобилях часто предусматривают не простое отключение ESP, а несколько режимов ее работы (например, «Sport»), которые допускают небольшие контролируемые заносы, но вмешиваются при достижении критических углов.
5. Часто задаваемые вопросы (FAQ)
- В: Почему мигает лампочка ESP на приборной панели?
- О: Мигание индикатора ESP во время движения — это нормальное явление. Оно означает, что система в данный момент активна и корректирует траекторию вашего автомобиля. Это сигнал водителю о том, что достигнут предел сцепления шин с дорогой, и следует снизить скорость или быть аккуратнее с маневрами.
В: Что означает, если лампочка ESP горит постоянно?
- О: Если индикатор ESP (или индикатор неисправности с изображением «скользкой дороги») горит постоянно, это свидетельствует о неисправности в системе. Система деактивирована, и автомобиль будет вести себя так, как будто ESP на нем нет. Причины могут быть разными: от неисправности датчика скорости колеса или «лягушки» (датчика нажатия педали тормоза) до выхода из строя дорогостоящего датчика угла поворота руля или самого блока ABS/ESP. Требуется компьютерная диагностика.
В: Нужно ли отключать ESP зимой в снегу?
- О: В большинстве случаев при движении по зимним дорогам отключать ESP не нужно. Она помогает сохранить контроль на скользком покрытии. Однако есть исключение: если вы застряли в глубоком снегу или пытаетесь заехать на очень скользкий подъем, система может мешать. Расценивая пробуксовку как опасность, она будет снижать тягу двигателя. В такой ситуации ESP (или, точнее, ее компонент TCS) можно кратковременно отключить, чтобы выехать «в раскачку» с пробуксовкой. После преодоления сложного участка систему необходимо включить обратно.
В: В чем разница между ESP и TCS (ASR)?
- О: TCS (Traction Control System) или ASR (Anti-Slip Regulation) — это антипробуксовочная система. Она является составной частью, подсистемой ESP. Задача TCS — предотвращать пробуксовку ведущих колес только при разгоне (в продольном направлении). ESP — это более комплексная система, которая контролирует не только продольную, но и поперечную динамику автомобиля, предотвращая боковые сносы и заносы. ESP использует TCS как один из своих инструментов.
В: Можно ли установить ESP на автомобиль, где ее не было с завода?
- О: Теоретически это возможно, но на практике — чрезвычайно сложно, дорого и нецелесообразно. Это потребует замены блока ABS, установки гидроблока ESP, прокладки новой проводки, установки всех недостающих датчиков (угла поворота руля, рыскания, ускорения) и сложной программной интеграции с ЭБУ двигателя и другими системами. Стоимость такой доработки может быть сопоставима со стоимостью самого автомобиля.
Заключение
Система курсовой устойчивости (ESP) является одним из величайших достижений в области автомобильной активной безопасности за последние десятилетия. Превратившись из опции для премиальных автомобилей в обязательный стандарт, она ежедневно доказывает свою эффективность, предотвращая аварии и спасая жизни. Интегрируя в себе функции ABS и TCS и дополняя их высокоточным контролем поперечной динамики, ESP выступает в роли невидимого «второго пилота», который постоянно следит за поведением автомобиля и готов мгновенно вмешаться в критической ситуации. Дальнейшее развитие этих систем идет по пути еще большей интеграции с другими ассистентами водителя (ADAS), такими как адаптивный круиз-контроль и системы автоматического торможения, формируя основу для будущих автономных транспортных средств.
Нормативные документы
- ГОСТ 33997-2016 — Колесные транспортные средства. Требования к безопасности в эксплуатации и методы проверки. (Устанавливает требования к наличию и работоспособности систем ABS и ESP при техосмотре).
- ГОСТ Р 58803-2020 — Системы стабилизации курсовой устойчивости легковых автомобилей и легких коммерческих автомобилей. Технические требования и методы испытаний. (Профильный стандарт, описывающий методики проверки и требования к системам ESP/ESC).
- ТР ТС 018/2011 — технический регламент Таможенного союза «О безопасности колёсных транспортных средств»
Список литературы
- Bosch. Automotive Handbook, 9th Edition. Wiley, 2014. — 1544 p.
- Reif, Konrad. Fundamentals of Automotive and Engine Technology. Springer Vieweg, 2014. — 464 p.
- Van Zanten, Anton T. «Bosch ESP Systems: 20 Years of Saving Lives,» ATZ worldwide, vol. 117, no. 6, 2015, pp. 20-27.
- В.А. Иларионов. Эксплуатационные свойства автомобиля. — М.: Машиностроение, 1966. — 280 с.
- Литвинов А.С., Фаробин Я.Е. Автомобиль: Теория эксплуатационных свойств. — М.: Машиностроение, 1989. — 240 с.
