Содержание страницы
Век автомобильных технологий неуклонно движется в сторону повышения безопасности и комфорта управления транспортным средством. Ключевую роль в этой эволюции играют усовершенствованные системы помощи водителю, известные под аббревиатурой ADAS (Advanced Driver-Assistance Systems). Они служат своего рода технологическим мостом между традиционным ручным управлением и полностью автономным вождением. Эти интеллектуальные ассистенты не заменяют водителя, а действуют как неусыпный второй пилот, способный предотвратить до 70% аварий, вызванных человеческим фактором. В данной статье мы проведем детальный технический разбор двух наиболее распространенных и важных систем: системы удержания в полосе движения и системы мониторинга «слепых» зон.
1. Система удержания в полосе (Lane Keeping Assist, LKA): Ваш штурман на трассе
Эта система является одним из фундаментальных элементов активной безопасности, разработанным для предотвращения непреднамеренного схода автомобиля с занимаемой полосы. Её эффективность максимальна на автомагистралях и дорогах с качественной, хорошо различимой разметкой. Принято разделять два поколения этих систем: пассивное и активное.
- Пассивные системы (Lane Departure Warning, LDW): Основная задача — своевременно предупредить водителя о пересечении линии разметки без включенного сигнала поворота. Система не вмешивается в управление, а лишь информирует об опасности.
- Активные системы (Lane Keep Assist, LKA): Представляют собой следующий этап эволюции. Наряду с предупреждением, они способны самостоятельно осуществлять корректирующее воздействие на рулевое управление, мягко возвращая автомобиль в центр полосы.
Хотя принцип действия схож, автопроизводители используют уникальные торговые наименования для своих систем, что является важным маркетинговым инструментом.
| Автопроизводитель | Торговое название системы |
|---|---|
| Audi, Volkswagen, SEAT | Lane Assist |
| BMW, Citroën, Kia, General Motors, Opel, Volvo | Lane Departure Warning System (чаще для пассивных систем) |
| Infiniti | Lane Departure Prevention |
| Honda, Fiat | Lane Keep Assist System |
| Ford | Lane Keeping Aid |
| Mercedes-Benz | Lane Keeping Assist |
| Nissan | Lane Keeping Support System |
| Toyota | Lane Monitoring System |
1.1. Архитектура и компоненты системы
Независимо от названия, LKA является сложным электронно-механическим комплексом, включающим в себя следующие ключевые элементы:
- Видеокамера: Цифровой «глаз» системы. Как правило, используется монохромная камера, поскольку она обеспечивает наилучший контраст для распознавания белых или желтых линий разметки на темном фоне асфальта (резкое изменение градации серого). Она интегрирована в единый блок с модулем управления и устанавливается на лобовом стекле, обычно в корпусе салонного зеркала заднего вида. Для корректной работы в непогоду зона обзора камеры очищается щетками стеклоочистителей и может иметь собственный нагревательный элемент.
- Электронный блок управления (ЭБУ): «Мозг» системы. Он получает оцифрованное изображение с камеры и в реальном времени обрабатывает его с помощью сложных алгоритмов. ЭБУ определяет наличие и тип разметки, рассчитывает ширину полосы, ее кривизну и точное положение автомобиля относительно ее границ.
- Исполнительные механизмы: Это «руки» системы, которые взаимодействуют с водителем и автомобилем. К ним относятся: контрольные лампы на приборной панели, зуммер для звуковых сигналов, вибромотор в рулевом колесе для тактильного предупреждения и, в активных системах, — электродвигатель электромеханического усилителя руля (ЭУР), создающий корректирующий момент.
- Органы управления: Обычно это клавиша на руле, подрулевом переключателе или центральной консоли, позволяющая водителю активировать или деактивировать систему.
1.2. Принцип работы пассивной системы (LDW)
После активации системы и достижения пороговой скорости (обычно выше 65 км/ч), камера начинает сканировать дорожное полотно. Если ЭБУ успешно идентифицирует линии разметки с обеих сторон автомобиля, система переходит в режим готовности, о чем сигнализирует зеленый индикатор на приборной панели. В случае, если траектория автомобиля начинает смещаться к одной из линий и возникает риск ее пересечения, система инициирует предупреждение — чаще всего это тактильная вибрация рулевого колеса, имитирующая проезд по шумовой разметке. Если водитель заблаговременно включил указатель поворота для совершения маневра, система расценивает это как преднамеренное действие и предупреждение не активирует.
1.3. Алгоритмы активной системы (LKA)
Появление массовых и точных электромеханических усилителей руля открыло эру активного вмешательства электроники в управление. Активная система LKA не просто наблюдает, но и действует, реализуя концепцию «зрение → мышление → действие».
В активном режиме ЭБУ на основе данных с камеры выстраивает так называемый «виртуальный коридор» движения, в пределах которого должен находиться автомобиль (Рис. 1, а). Система постоянно отслеживает положение автомобиля внутри этого коридора. Как только автомобиль приближается к одной из границ виртуальной полосы, ЭБУ рассчитывает необходимый корректирующий момент и подает команду на электродвигатель ЭУР. Создается легкое, но ощутимое усилие на руле, плавно возвращающее машину к центру полосы (Рис. 1, б). Величина этого усилия, как правило, не превышает 3 Н·м, чтобы водитель мог в любой момент его преодолеть и сохранить полный контроль над ситуацией.
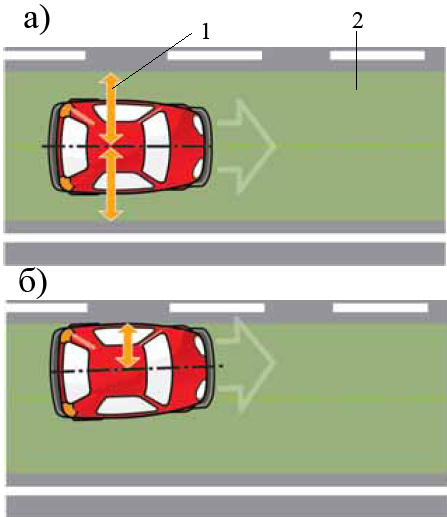
Рис. 1. Схема движения автомобиля на прямом участке: а — движение в безопасном коридоре; б — система создает корректирующий момент; 1 — боковое смещение автомобиля к границе виртуальной полосы; 2 — виртуальный коридор движения
Если корректирующего подруливания оказывается недостаточно (например, из-за высокой скорости в крутом повороте), система дополнительно активирует вибрацию руля и звуковой сигнал, требуя немедленного вмешательства водителя. Система также способна распознавать, что водитель убрал руки с руля. Это реализуется через анализ данных с датчика крутящего момента в рулевом механизме. При обычном вождении руки водителя постоянно совершают микроподруливания, компенсируя неровности дороги, что создает постоянный «шум» на датчике. Если этот «шум» пропадает более чем на 8-10 секунд, система делает вывод, что руль отпущен, и активирует серию предупреждающих сигналов.
1.4. Ограничения и условия деактивации
Важно понимать, что LKA — это ассистент, а не автопилот. Система временно деактивируется и переходит в пассивный режим (сменяя индикацию на желтый цвет) в следующих условиях:
- Скорость движения ниже пороговой (менее 65 км/ч).
- Неблагоприятные погодные условия: сильный снегопад, ливень, туман.
- Загрязненное лобовое стекло в зоне камеры.
- Отсутствующая, стертая или неконтрастная дорожная разметка.
- Сложные дорожные условия, например, участки ремонта с несколькими временными разметками.
- Движение по слишком узкой или широкой полосе.
2. Система мониторинга «слепых» зон (Blind Spot Monitoring, BSM): Ваш дополнительный обзор
Одной из частых причин ДТП при перестроении является наличие так называемой «слепой» или «мертвой» зоны — области, невидимой в боковые зеркала. Система BSM предназначена для решения именно этой проблемы, информируя водителя о транспортных средствах, находящихся в опасной близости на соседних полосах.
Данная технология получила широкое распространение и, как и LKA, имеет различные коммерческие наименования.
| Автопроизводитель | Торговое название системы |
|---|---|
| Audi, Volkswagen | Side Assist |
| BMW | Lane Change Warning |
| Mazda | Rear Vehicle Monitoring (RVM) |
| Mercedes-Benz | Blind Spot Assist |
| Porsche | Spurwechselassistent (SWA) |
| Ford, Volvo | Blind Spot Information System (BLIS) |
2.1. Конструкция и принцип действия
Система BSM использует не оптические, а радарные или ультразвуковые датчики. Чаще всего это два радара, работающие в диапазоне 24 ГГц, которые скрытно установлены по углам заднего бампера. Они непрерывно сканируют пространство сзади и по бокам автомобиля на расстоянии до 50 метров.
Электронный блок управления анализирует отраженные сигналы, отфильтровывая неподвижные объекты (ограждения, столбы, припаркованные машины) и отслеживая только движущиеся. Основным элементом оповещения служат сигнальные индикаторы, интегрированные непосредственно в корпуса боковых зеркал заднего вида (Рис. 2).

Рис. 2. Расположение сигнальных индикаторов BSM в боковом зеркале
2.2. Режимы работы и сценарии
Система BSM работает в двух основных режимах:
- Информационный режим: Если в «слепой» зоне на соседней полосе появляется автомобиль, соответствующий индикатор в зеркале загорается ровным светом. Это пассивное информирование, которое не отвлекает водителя, но привлекает его внимание к потенциальной помехе.
- Режим предупреждения: Если система обнаружила объект в «слепой» зоне, и при этом водитель включает указатель поворота в ту же сторону, намереваясь перестроиться, система переходит в активный режим. Индикатор начинает ярко мигать, и зачастую предупреждение дублируется звуковым сигналом.
Рассмотрим типичные дорожные ситуации, в которых система доказывает свою эффективность (Рис. 3).
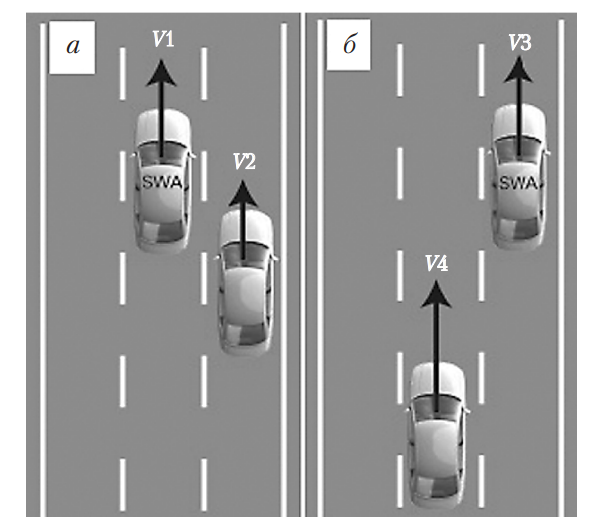
Рис. 3. Типичные дорожные сценарии для ассистента смены полосы: а — ситуация 1 (медленный обгон); б — ситуация 2 (быстрое приближение сзади); SWA — автомобиль, оснащенный системой
Ситуация 1 (Рис. 3, а): Ваш автомобиль (V1) опережает другой автомобиль (V2) с небольшой разницей в скорости. Из-за этого V2 надолго «зависает» в вашей мертвой зоне. Система BSM обнаружит это и зажжет индикатор в правом зеркале. Попытка перестроиться вправо вызовет активное мигание индикатора.
Ситуация 2 (Рис. 3, б): Вы движетесь в своей полосе (V3), а сзади по соседней полосе вас на высокой скорости догоняет другой автомобиль (V4). Система заблаговременно обнаружит быстро приближающийся объект и активирует информационный индикатор в левом зеркале еще до того, как V4 окажется в мертвой зоне, предотвращая опасный маневр «под обгон».
Заключение
Системы удержания в полосе и мониторинга «слепых» зон уже стали стандартом де-факто для большинства современных автомобилей. Они являются ярким примером того, как интеллектуальные технологии могут эффективно компенсировать невнимательность водителя и значительно снижать риски на дороге. Их развитие не стоит на месте: происходит слияние данных с камер и радаров (сенсорное слияние), интеграция с навигационными системами для превентивной адаптации к поворотам и развязкам, а также улучшение алгоритмов на базе искусственного интеллекта. Эти ассистенты — не просто опции комфорта, а важнейшие компоненты, закладывающие фундамент для безопасного и, в конечном итоге, полностью автономного будущего автомобильного транспорта.
