Содержание страницы
Современные автомобили являются высокотехнологичными устройствами, которые включают в себя множество электронных систем и компонентов, обеспечивающих комфорт, безопасность и эффективность управления. Одним из ключевых элементов таких систем является шина передачи данных, которая представляет собой каналы связи для обмена информацией между различными модулями и устройствами в автомобиле.
В последние десятилетия автомобильная электроника претерпела значительные изменения, что привело к развитию и усовершенствованию различных шин передачи данных, таких как CAN, FlexRay и MOST. Эти шины обеспечивают быструю, надежную и безопасную передачу информации, что делает возможным функционирование таких сложных систем, как системы помощи водителю (ADAS), мультимедийные системы, системы безопасности, двигатели и трансмиссии, а также множество других функций, с которыми мы сталкиваемся в современных автомобилях.
Шины передачи данных начали развиваться с 1980-х годов, когда в автомобилях стали внедряться более сложные электронные системы. Наибольшее распространение в автомобилях получила шина CAN (Controller Area Network), которая была разработана компанией Bosch в 1983 году. Основной задачей этой шины было создание надежной и быстрой системы обмена данными между электронными блоками управления в автомобиле. Разработка шины CAN стала поворотным моментом в истории автомобильной электроники, так как она обеспечила замену большого количества проводов на одну, что сделало системы более компактными и дешевыми в производстве.
В конце 1990-х и начале 2000-х годов появились новые шины, такие как FlexRay и MOST. Эти системы разрабатывались для удовлетворения растущих требований к скорости передачи данных и надежности в сложных автомобильных системах. FlexRay, например, была специально разработана для применения в системах, требующих гарантированной скорости передачи данных и минимальных задержек, таких как системы активной безопасности и автономные автомобили. В свою очередь, MOST была ориентирована на передачу аудио- и видеосигналов с высокой пропускной способностью, что сделало ее идеальной для мультимедийных систем.
Обзор современных систем передачи данных
Одним из самых заметных трендов является переход от централизованных систем управления к распределённым системам. Эти новые решения подразумевают соединение блоков управления, интеллектуальных датчиков и исполнительных механизмов через сеть, что минимизирует использование проводов и соединений.
В результате такого подхода значительно повышается сложность диагностики, а также снижается общая надёжность системы.
С увеличением распространения электронных систем управления как с обратной связью, так и без неё, возникла необходимость интеграции различных электронных блоков в единую сеть. Это позволяет им взаимодействовать между собой, повышая эффективность работы автомобиля.
К таким системам управления можно отнести:
- контроль за работой коробки передач;
- электронное управление двигателем и регулировка подачи топлива;
- система антиблокировки тормозов (ABS);
- противобуксовочная система (ASR);
- система курсовой устойчивости (ESP);
- управление тормозным моментом (MSR);
- иммобилайзер (EWS);
- бортовой компьютер и другие системы.
Этот обмен информацией между различными системами уменьшает общее количество датчиков, что, в свою очередь, упрощает управление отдельными элементами автомобиля и повышает его эксплуатационные характеристики.
Интерфейсы передачи данных, которые проектируются для автомобилей, можно разделить на несколько типов:
- классические интерфейсы;
- последовательные интерфейсы, например, сеть контроллеров CAN;
- широкополосные шины передачи данных с временным разделением каналов, такие как FlexRay;
- оптические интерфейсы передачи данных, как шина типа MOST.
Классическая передача данных (интерфейсы)
Классическая передача данных в автомобилях предполагает, что каждый сигнал передаётся по отдельному каналу связи, который обычно реализован в виде проводов (рис. 1). Это означает, что с увеличением количества передаваемой информации растёт и количество проводов, а также контактов на блоках управления. Такой тип передачи данных оправдан в тех случаях, когда объём информации ограничен.
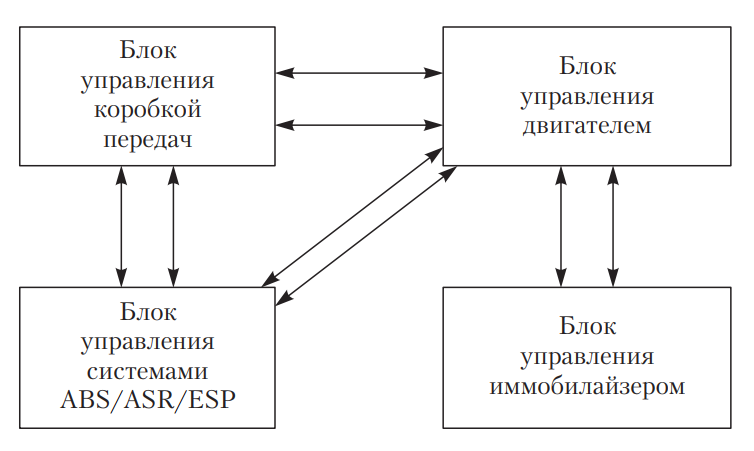
Рис. 1. Схема классической передачи данных
Однако с ростом объёма данных, передаваемых между электрическими компонентами автомобиля, классические интерфейсы уже не могут удовлетворять потребности современных автомобилей. Это стало причиной перехода на более эффективные системы, такие как шины передачи данных.
Шина данных CAN
В ответ на растущие требования к передаче информации в современных автомобилях, вместо традиционных проводных соединений активно используется цифровая шина CAN (Controller Area Network). Эта цифровая передача данных значительно превосходит по надежности аналоги, так как она обеспечивает защиту от помех и более качественную изоляцию контактов от внешних воздействий.
Шина CAN представляет собой открытую систему, что позволяет подключать как медные, так и стекловолоконные кабели.
Цифровая шина CAN значительно упрощает процесс диагностики и ремонта поломанных компонентов. Универсальная проводка дает возможность подключения различных устройств к разъемам автомобиля, независимо от его комплектации.
В зависимости от необходимости в скорости передачи данных и приоритетах, шина может быть одно- или двухпроводной. Если для работы систем достаточно низкой скорости, используется однофазная шина. Для систем, требующих высокой скорости, применяется двухпроводная шина.
Второй провод в двухпроводной системе выполняет функцию проверки корректности передаваемой информации и самоконтроля модуля. Данные передаются по обоим проводам одновременно, причем сигнал на первом проводе является инвертированным сигналом с второго провода.
Шина CAN подключает все управляющие блоки параллельно. Один из проводов обозначается как верхний (CAN High), а второй — как нижний (CAN Low). Эти два провода скручиваются между собой, образуя пару (Twisted Pair) (рис. 2).
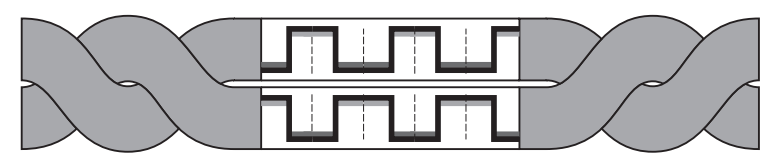
Рис. 2. Шина CAN
Скручивание проводов необходимо для минимизации электромагнитных помех и излучения. Оно также снижает вероятность воздействия на другие устройства, расположенные рядом.
По проводу CAN High данные передаются с напряжением от 2,5 до 3,5 В, а по CAN Low — с напряжением от 1,5 до 2,5 В (рис. 3). Когда разница напряжений равна нулю, это означает логический ноль, а разница в 2 В — логическую единицу.
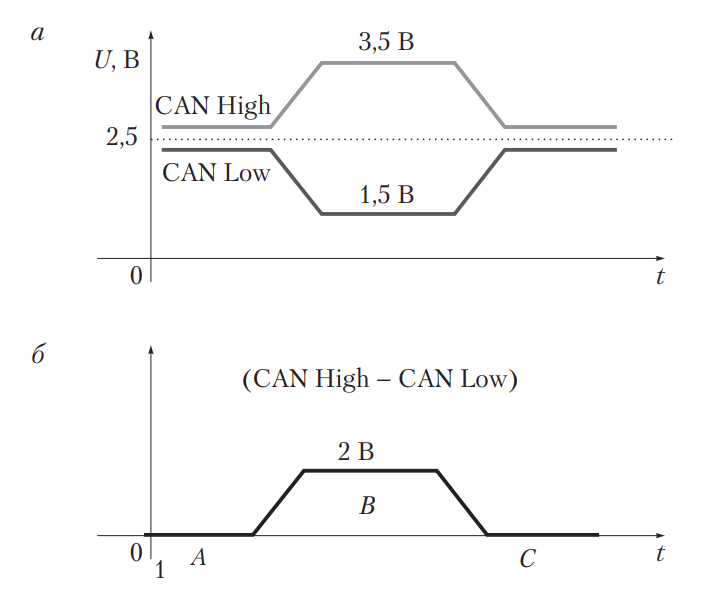
Рис. 3. Передача информации по шине CAN: а — напряжение; б — разница напряжений; А, С — логический уровень = 0; B — логический уровень = 1
Шина CAN является мультимастерной, что означает отсутствие центрального контроллера. Все подключенные блоки управления имеют равный доступ к шине и могут как передавать данные, так и принимать их.
CAN-шина относится к типу последовательных шин. Обмен данными осуществляется по протоколу, который передает сообщения от одного блока управления к другому с минимальными интервалами.
Протокол состоит из последовательности бит, которые передаются один за другим. Размер поля данных определяет количество битов в передаче. Каждый бит может быть равен «0» или «1» (логическое значение).
Биты передаются последовательно, как бусины на нитке, и так же принимаются. Составление кадра (рис. 4) из битов представляет собой основную единицу передачи информации.
Начало фрейма означает начало протокола передачи данных.
Арбитражное поле определяет приоритет передачи данных. Если два блока управления пытаются передать сообщение одновременно, то передастся сообщение с более высоким приоритетом. Также в этом поле указывается тип передаваемой информации (например, частота вращения двигателя).
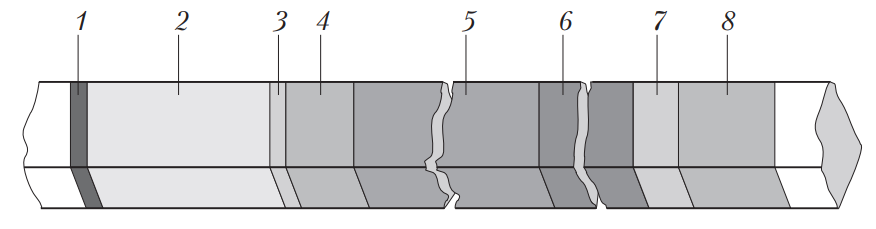
Рис. 4. Кадр передачи данных: 1 — начало кадра (1 бит); 2 — арбитражное поле (11 бит); 3 — неиспользуемое поле (1 бит); 4 — поле управления (6 бит); 5 — поле данных (64 бита); 6 — поле CRC (16 бит); 7 — поле ACK (2 бита); 8 — конец кадра (7 бит)
В поле управления записывается количество бит данных, что позволяет приемнику проверить их полноту.
Поле данных содержит элементы, которые передаются между блоками управления, и составляет от 0 до 64 бит (от 0 до 8 байт).
Поле CRC предназначено для обнаружения ошибок в процессе передачи.
Поле ACK служит для подтверждения успешного приема данных. В случае ошибки передатчик получает сигнал об ошибке и передает данные заново.
Конец кадра подтверждает успешное завершение передачи и отправляет сигнал о завершении приемнику. Если произошла ошибка, процесс передачи останавливается, а затем повторяется.
По завершении передачи данных, кадр может включать несколько параметров. Например, кадр ЭБУ системы впрыска топлива может включать следующие параметры:
- частота вращения коленчатого вала;
- средний крутящий момент;
- скорость, заданная водителем;
- состояние системы круиз-контроля;
- разрешение на работу компрессора кондиционера;
- крутящий момент без учета коробки передач.
Некоторые кадры передаются периодически, например, каждые 10 секунд, другие — по событию. Например, кадр ЭБУ подушек безопасности передается при аварии, с одновременным выключением топливного насоса и разблокировкой дверных замков.
Данные передаются в виде посланий, которые могут быть отправлены и приняты любым блоком управления. Каждое послание, согласно протоколу (рис. 5), содержит информацию о физическом параметре, например, частоте вращения двигателя.
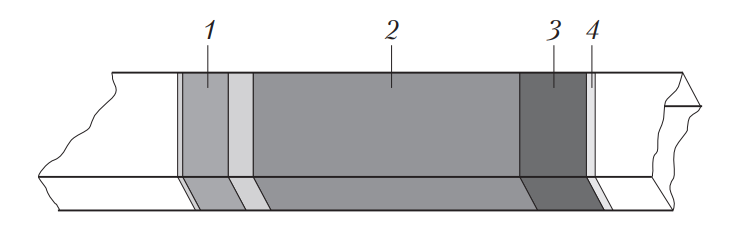
Рис. 5. Структура послания через шину CAN: 1 — идентификационный код послания (11 бит); 2 — содержание послания (до 8 × 8 бит); 3 — контрольная сумма (16 бит); 4 — подтверждение приема
Идентификационный код может представлять частоту вращения коленчатого вала, а в одном сообщении могут быть дополнительные данные, такие как холостой ход и режим работы двигателя. Частота вращения передается в двоичной форме (рис. 6).
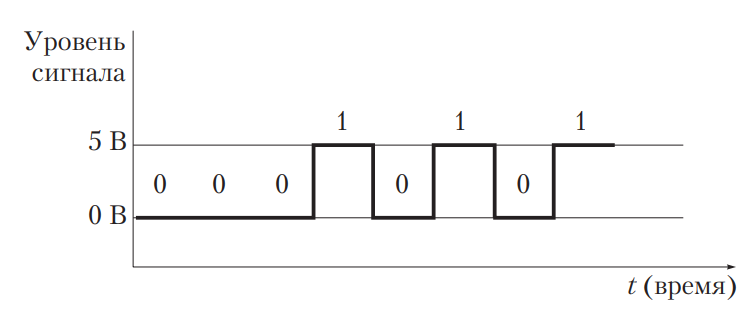
Рис. 6. Передача электрических сигналов по времени
Таблица 1 иллюстрирует, как передаются данные, например, угол положения дроссельной заслонки, что возможно благодаря 8-битной передаче. Положение заслонки передается с шагом 0,4°, от 0° до 102°.
Таблица 1. Изменение данных в шине в зависимости от положения дроссельной заслонки
| Биты | Угол дроссельной заслонки, град. |
| 0000 0000 | 0,0 |
| 0000 0001 | 0,4 |
| 0000 0010 | 0,8 |
| … | … |
| 0101 0101 | 34,0 |
| … | … |
| 1111 1111 | 102,0 |
Современные автомобили используют три типа шин для различных скоростей передачи (рис. 7). Для критичных систем, таких как ABS или ESP, применяется шина с пропускной способностью 500–1000 Кбит/с, что обеспечивает работу в реальном времени.
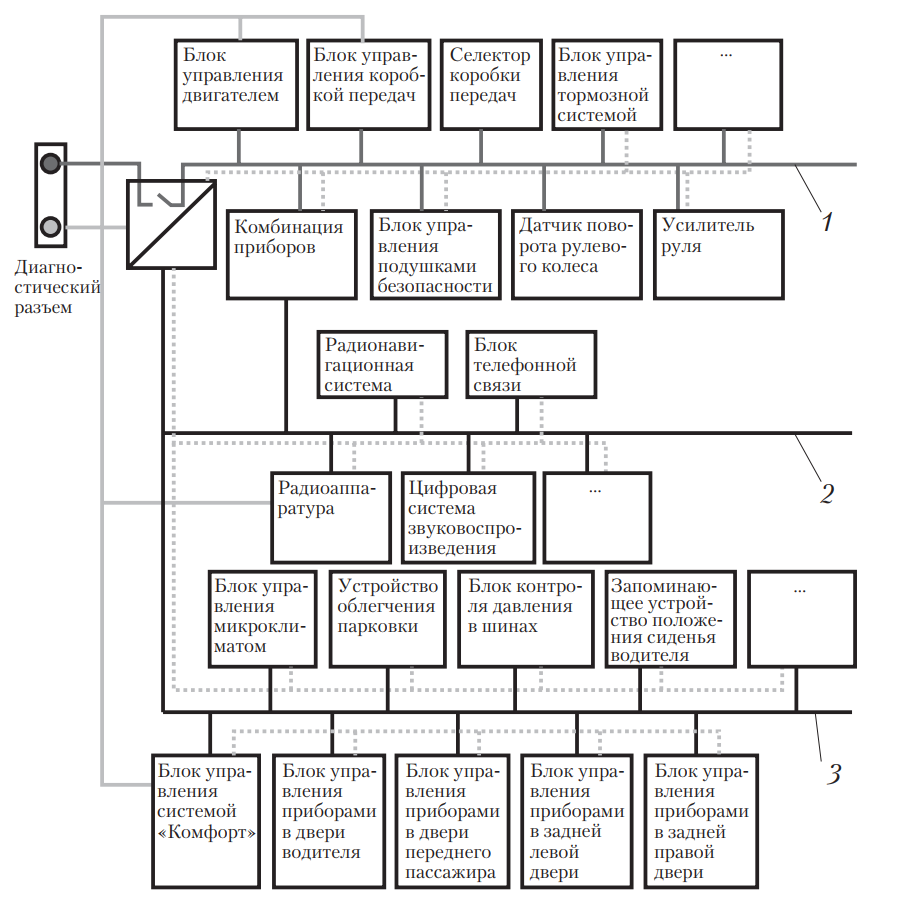
Рис. 7. Система шин CAN (на примере автомобиля Polo, модель 2002 г.): 1 — шина наиболее важных устройств; 2 — шина информационной системы; 3 — шина системы комфорта
Менее важные системы, такие как радио или кондиционер, подключаются к шине с более низкой скоростью — 95,2…100 кбит/с.
Для «медленных» устройств, например, дверных замков и освещения, используется шина с пропускной способностью 33,3…100 кбит/с.
Вместо традиционного ключа зажигания в автомобилях с CAN-шинами часто используется электронный брелок для взаимодействия с блоком управления двигателем через цифровую шину.
Шина FlexRay
С учетом растущих требований по скорости передачи данных и безопасности, широкополосные шины передачи с временным разделением каналов (или с временным управлением) становятся все более востребованными. В отличие от шины CAN, которая работает по принципу событийного управления, шина FlexRay предоставляет более высокую скорость передачи и большую устойчивость к сбоям.
FlexRay представляет собой последовательную, детерминированную и высоко надежную шину передачи данных, предназначенную для использования в автомобилях. При скорости передачи данных в 10 Мбит/с, она превосходит шину CAN более чем в 20 раз (CAN работает на скорости 500 кбит/с).
Еще одной важной характеристикой является детерминированная передача данных, что означает предсказуемое время реакции, или латентный период. Это время, которое необходимо для того, чтобы сообщение достигло получателя. Такая передача идеально подходит для применения в реальном времени, так как все данные приходят в заранее определенные моменты времени.
Шина FlexRay состоит из двух проводов. Провод с положительным напряжением (batarea plus, BP) обычно обозначают красным цветом, а провод с отрицательным напряжением (batarea minus, BM) — синим. Напряжение на обоих проводах варьируется от 2,2 до 2,8 В (в отличие от шины CAN, где напряжение составляет 1,5–3 В). Разность напряжений на проводах FlexRay должна быть не менее 600 мВ, тогда как в шине CAN эта разница составляет 2 В.
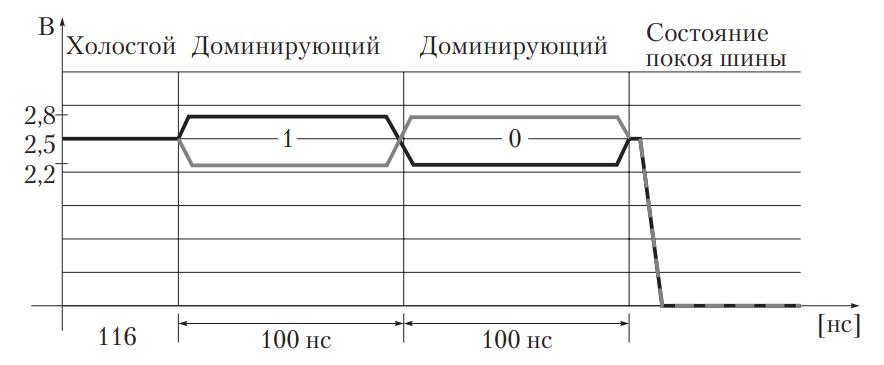
Рис. 8. Передача информации по шине FlexRay
Сигналы на шине FlexRay могут находиться в трех различных состояниях:
- холостой режим — напряжение на обоих проводах шины стабильно на уровне 2,5 В (этот режим также называют режимом холостого хода). «Рецессивный» уровень напряжения может быть перекрыт сигналами других управляющих блоков;
- состояние 0 — провод BP находится на низком уровне, а BM на высоком доминирующем уровне напряжения. «Доминирующий» уровень напряжения не может быть изменен другими блоками;
- состояние 1 — провод BP находится на высоком уровне, а BM на низком доминирующем уровне напряжения.
При таких условиях время, необходимое для передачи одного бита, составляет всего 100 наносекунд (для сравнения: в шине CAN время передачи составляет 2000 нс).
Шина MOST
Для соединения центрального блока информационно-командной системы с процессором других автомобильных систем, включая навигационные, используется оптический кабель, представляющий шину типа MOST (Media Oriented Systems Transport). Это решение помогает эффективно защищать линию передачи данных от внешних помех. П
роцесс передачи через оптический кабель включает преобразование аналоговых сигналов в световые импульсы, которые затем распространяются по стекловолокну. Световые волны имеют более короткую длину волны, чем радиоволны, что делает их невосприимчивыми к электромагнитным помехам и исключает их генерацию.
Металлические проводники, в свою очередь, создают вокруг себя электромагнитные поля, что может вызывать помехи (рис. 9). Это может происходить, например, при параллельном или перекрещивающемся расположении проводников с током. Также на проводники могут влиять электромагнитные волны, генерируемые мобильными телефонами или другими электронными устройствами. В случае оптической передачи таких помех не существует.
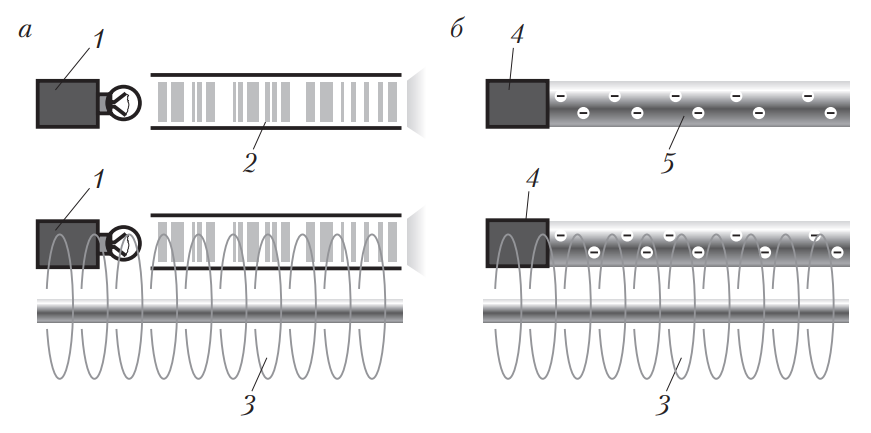
Рис. 9. Передача тока через волоконно-оптический (а) и металлический (б) проводники: 1 — цифровая информация; 2 — импульсы света в оптическом кабеле; 3 — электромагнитное поле проводника; 4 — аналоговая или цифровая информация; 5 — электроны в металлическом проводнике
Главное преимущество современных волоконно-оптических систем — это отсутствие помех, а также высокая скорость передачи данных, которая может достигать 21,2 Мбит/с. Это значение достаточно для передачи цифровых сигналов, что делает такую технологию идеальной для аудио- и видеопередач с высоким требованием к скорости передачи, достигающей 6 Мбит/с и выше. В отличие от шины CAN, которая ограничена в скорости до 1 Мбит/с, особенно при использовании множества проводов.
Основными компонентами волоконно-оптических систем (рис. 10) являются такие устройства, как светодиоды, фотодиоды, трансиверы, световоды и микропроцессоры.
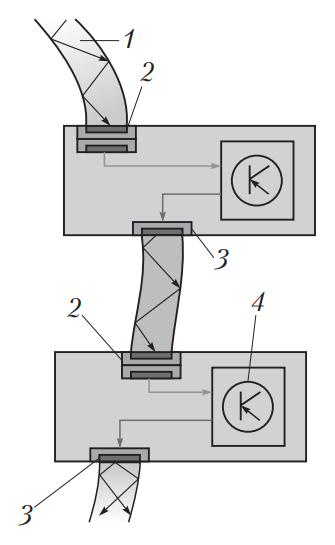
Рис. 10. Основные компоненты волоконно-оптической системы: 1 — световод; 2 — фотодиод; 3 — светодиод; 4 — трансивер
Светодиод преобразует электрический сигнал в световые импульсы, длина волны которых составляет около 650 нм, что приводит к появлению красного света.
Фотодиод, в свою очередь, преобразует световые волны обратно в электрические сигналы.
Световод служит для передачи световых волн от передатчика одного устройства к приемнику другого.
Одним из ограничений волоконно-оптических систем является необходимость соблюдения определенных условий при изгибе световода. Радиус изгиба не должен быть меньше 25 мм, что ограничивает его гибкость в некоторых ситуациях.
Шина MOST представляет собой последовательную шину для передачи данных, включая аудио-, видеосигналы и данные, по оптическому кабелю (рис. 11). Эта шина работает в кольцевой топологии, что позволяет ей включать до 64 устройств.
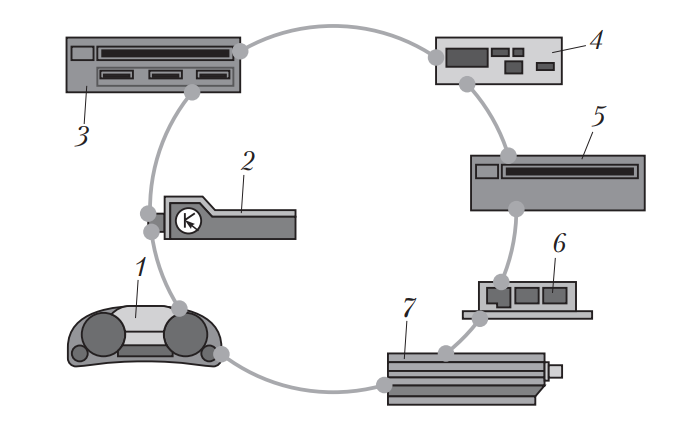
Рис. 11. Шина MOST (на примере Touareg 2011 Volkswagen): 1 — ЭБУ в комбинации приборов; 2 — диагностический интерфейс шин данных; 3 — ЭБУ информационной электронной системы; 4 — ТВ-тюнер; 5 — DVD чейнджер; 6 — головное устройство аудиосистемы; 7 — ЭБУ цифровой аудиосистемы
Используя оптическую шину MOST, обмен данными между подключенными абонентами происходит в цифровом формате, что позволяет достигать высокой скорости передачи и обеспечивает надежную работу в условиях современных автомобильных технологий.
Заключение
Интересные факты:
- CAN: Шина CAN используется не только в автомобилях, но и в других отраслях, таких как промышленность, автоматизация и медицинская техника. Она стала стандартом в области обмена данными между электронными устройствами, благодаря своей надежности и простоте.
- FlexRay: Эта шина стала одним из ключевых компонентов для внедрения в автомобили систем с автопилотом и поддержкой автономного вождения. Для таких систем крайне важны высокая скорость передачи и минимальные задержки данных, что FlexRay и обеспечивает.
- MOST: В отличие от других шин, которые ориентированы на передачу данных в рамках системы управления автомобилем, MOST активно используется для передачи аудио- и видеосигналов. Эта шина позволила создать мультимедийные системы с высокой пропускной способностью, которые сегодня популярны в премиум-сегменте автомобилей.
- Эволюция шин: Современные автомобильные системы, использующие CAN, FlexRay и MOST, на самом деле продолжают эволюционировать, и уже рассматриваются новые подходы к передаче данных, включая беспроводные технологии и сети нового поколения, такие как 5G.
Шины передачи данных являются неотъемлемой частью современной автомобильной электроники. Их роль в обеспечении функциональности и безопасности автомобилей невозможно переоценить. С развитием технологий и увеличением требований к скорости, надежности и безопасности автомобильных систем, шины, такие как CAN, FlexRay и MOST, играют ключевую роль в развитии инновационных функций, от автономного вождения до мультимедийных решений для водителей и пассажиров. Современные автомобили становятся все более технологичными, и дальнейшее развитие шин передачи данных будет играть важную роль в обеспечении интеграции новых технологий и создании более безопасных и удобных транспортных средств для будущего.
Регулярно публикую материалы о передовых методах обработки и сварки материалов, а также освещаю новинки в сфере производства,материаловедения, строительства и др.