Содержание страницы
Современные машины и механизмы практически невозможно представить без приводных систем, которые обеспечивают согласование параметров электродвигателя с рабочим органом. От правильности расчета привода зависят надежность работы, экономичность и долговечность оборудования. При этом ключевыми этапами проектирования являются определение частоты вращения выходного вала, расчет передаточного отношения, оценка КПД и выбор электродвигателя.
В инженерной практике расчет привода базируется на общепринятых методиках, закрепленных в действующих стандартах (например, ГОСТ 21354-87, ГОСТ 19523-81). В данной статье приведено последовательное изложение теории и практики расчета: от исходных данных рабочего органа машины до окончательного подбора двигателя и уточнения частных передаточных отношений.
1. Подбор электродвигателя для работы в составе машины или механизма
Задача выбора электродвигателя для привода различных производственных машин и механизмов встречается в инженерной практике достаточно часто. Она возникает в двух основных ситуациях:
- подбор нового двигателя для замены устаревшего агрегата при модернизации существующей установки;
- определение параметров электродвигателя для вновь проектируемой машины, когда приводная система создается с нуля.
Ключевыми исходными данными для проектирования привода являются кинематическая схема установки, режим работы механизма, его нагрузочные характеристики, а также энергетические показатели. Эти сведения позволяют выполнить расчет требуемой мощности и выбрать оптимальный тип двигателя.
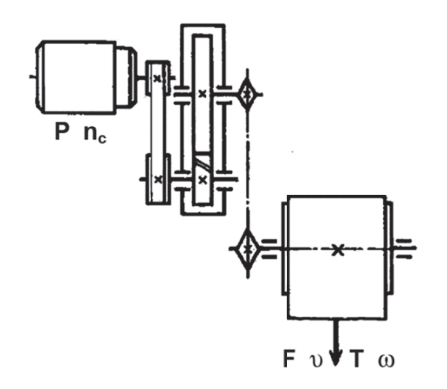
Рис. 1. Кинематическая схема привода ленточного конвейера
Перед непосредственным подбором двигателя необходимо тщательно проанализировать кинематическую схему. В качестве примера на рис. 1 приведена схема привода ленточного конвейера: вращение от электродвигателя передается на приводной барабан через систему механических передач — ременную, далее через зубчатый редуктор и цепную передачу.
Для корректного выбора мощности требуется знать крутящий момент Тр (Н·м) и угловую скорость ωр (рад/с) на валу барабана. Допускается задание исходных данных в виде силы тяги F (Н) и скорости движения ленты v (м/с).
Мощность Р (Вт), необходимая от двигателя, определяется расчетной зависимостью:
![]()
где произведение Fv выражает полезную мощность (Вт), а η — коэффициент полезного действия привода, который зависит от КПД отдельных звеньев механической передачи. Он вычисляется как произведение частных КПД всех передач:
![]()
Для инженерных расчетов часто используют справочные значения КПД и диапазоны передаточных чисел различных передач. Сводные данные представлены в табл. 1.
Таблица 1. Справочные параметры одноступенчатых передач различных типов
| Тип передачи | Передаточное отношение | КПД | Передаваемая мощность, кВт | Относительные габаритные размеры | Относительная масса |
| Зубчатые передачи в закрытом исполнении: | |||||
| цилиндрические | 3÷10 | 0,98 | по расчету | 1 | 1 |
| конические | 2÷6 | 0,95 | до 4000 | 2 | 1,0÷1,2 |
| планетарные Аbаh | 3÷12 | 0,96÷0,98 | до 5000 | 0,7÷1 | 0,73÷0,93 |
| планетарные Вbаh | 8÷25 | 0,95÷0,97 | до 5000 | 0,8÷1,1 | 0,8÷0,95 |
| волновые иbbg | 80÷250 | 0,7÷0,9 | до 150 | 0,5÷0,6 | 0,05÷0,15 |
| червячные z =1 | 10÷80 | 0,7÷0,8 | до 60 | 1÷1,6 | ≈1,04 |
| червячные z =4 | 10÷80 | 0,85÷0,95 | до 60 | 1÷1,6 | ≈1,04 |
| Цепные передачи (закрытые) | 2÷10 | 0,95÷0,97 | до 120 | 1÷1,6 | 0,25 |
| Ременные (трением) | 2÷8 | 0,94÷0,96 | до 50 | 4÷5 | 0,4÷0,5 |
| Зубчато-ременные | 3÷12 | 0,96÷0,98 | до 100 | 2,5÷3 | 0,3 |
| Фрикционные | до 7 | 0,85÷0,95 | до 20 | 1,5÷2 | 1,5 |
Примечания:
|
|||||
В инженерной практике используют также базовые зависимости:
ω = πn/30, где ω — угловая скорость (рад/с), n — частота вращения (мин-1).
Крутящий момент определяется из выражений:
Т = 9,55Р/n (Н·м) или Т = Р/ω.
Соотношение между моментами на входном и выходном валах передачи учитывает передаточное число u и КПД η:
![]()
Выбираемый электродвигатель должен обладать мощностью Рд, не меньшей расчетной величины Р:
![]()
На практике наибольшее распространение получили трехфазные асинхронные двигатели серии 4А (ГОСТ 183–74 и ГОСТ 2479–79), которые применяются в приводах различного назначения.
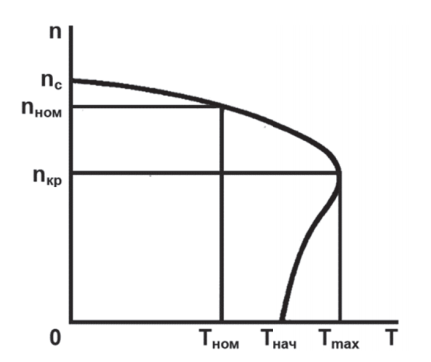
Рис. 2. Типовая механическая характеристика асинхронного двигателя трехфазного тока
На рис. 2 представлена зависимость частоты вращения n (мин-1) вала двигателя от развиваемого момента Т (Н·м). По оси абсцисс показаны значения: Тном — номинальный момент, Тпуск=Тнач — пусковой момент, обеспечивающий разгон, и Ттах — максимальный кратковременный момент. На оси ординат отражены частоты: номинальная nном, критическая nкр и синхронная nс, равная частоте вращения магнитного поля. Последняя зависит от частоты питающей сети f и числа пар полюсов p:
![]()
Для угловой скорости:
![]()
При стандартной частоте сети f = 50 Гц (1/с) и числе пар полюсов р = 1÷6 синхронные частоты составляют: nс = 3000; 1500; 1000; 750; 600 и 500 мин-1. Следует учитывать, что с ростом числа пар полюсов увеличиваются габариты двигателя. Поэтому для установок, где требуется скорость выше 1000 мин-1, применение двигателей с числом пар полюсов более трех нецелесообразно.
При увеличении нагрузки фактическая скорость ротора снижается вследствие скольжения s, определяемого соотношением:
В момент пуска электродвигателя рабочий процесс сопровождается изменением крутящего момента от Тпуск до Ттах. В этом диапазоне частота вращения вала двигателя постепенно увеличивается и достигает критического значения nкр (см. рис. 2). Работа в точке, соответствующей Ттах, считается недопустимой, так как двигатель оказывается в режиме кратковременной перегрузки, что приводит к перегреву и снижению ресурса изоляции обмоток.
По мере увеличения частоты вращения и уменьшения нагрузки с уровня Ттах до Тном двигатель выходит на устойчивый установившийся режим. При дальнейшем снижении нагрузки частота вращения стремится к синхронному значению nс.
Для наглядности можно рассмотреть несколько характерных состояний:
- при пуске Т = Тпуск, скольжение s = 1, скорость n = 0;
- при номинальном режиме Т = Тном, s = 0,02÷0,05, при этом nном ≈ (0,95÷0,98) nс;
- при холостом ходе момент Т = 0, скольжение s = 0, и n = nс.
Таким образом, скольжение является важнейшей характеристикой асинхронного двигателя и всегда учитывается при расчете режимов работы согласно ГОСТ 183–74.
В промышленности наибольшее распространение получили асинхронные двигатели закрытого обдуваемого исполнения. Их параметры детально приведены в заводских каталогах и в справочниках по электроприводу.
Наиболее типичной является серия 4А, которая охватывает широкий диапазон мощностей — от 0,06 до 400 кВт. Высота оси вращения валов этих двигателей составляет от 50 до 355 мм. Серия 4А ориентирована на применение в приводах машин общего назначения, где отсутствуют повышенные требования к динамике разгона, пусковым характеристикам и величине скольжения.
Условия эксплуатации:
- диапазон рабочих температур окружающего воздуха от −40 до +40 °С;
- защита от воздействия пыли и влаги, соответствующая нормам по IP-кодам (ГОСТ 14254–96).
По степени защиты серия 4А выпускается в исполнениях:
- закрытые обдуваемые (IP44) — наиболее распространенный вариант;
- защищенные (IP23) — применяются в менее жестких условиях.
Выпускаемые исполнения по конструкции:
- М100 — двигатель на лапах (базовый вариант);
- М200 — двигатель с лапами и фланцевым щитом;
- М300 — двигатель только с фланцевым щитом.
Для исполнения IP23 применяется лишь базовый вариант на лапах.
Асинхронные двигатели серии 4А производятся с различными синхронными частотами вращения: 3000, 1500, 1000 и 750 мин−1. Эти значения соответствуют сетям переменного тока частотой 50 или 60 Гц.
Условное обозначение двигателя отражает все его основные характеристики. Пример: 4АНХ315МВ4У3:
- «4» — номер серии;
- «А» — асинхронный двигатель;
- «Н» — защищенное исполнение (если отсутствует — двигатель закрытый обдуваемый);
- «Х» — корпус из чугуна со щитами из алюминия (буква «А» означает алюминиевое исполнение станины и щитов);
- «315» — высота оси вращения вала в мм;
- «М» — установочный размер по длине станины (S, M, L — короткая, средняя и длинная соответственно);
- «В» — длина сердечника статора (при отсутствии литеры берется базовая длина);
- «4» — число полюсов;
- «У3» — климатическое исполнение и категория размещения по ГОСТ 15150–69.
Таблица 2 Технические данные асинхронных электродвигателей серии 4А (закрытое обдуваемое исполнение по ГОСТ 19523–81, выборка)
| P, кВт | d вала, мм | Синхронная частота вращения, мин −1 | |||||||||||
| 3000 | 1500 | 1000 | 750 | ||||||||||
| тип двигателя | s, % | Tм/Tн | тип двигателя | s, % | Tм/Tн | тип двигателя | s, % | Tм/Tн | тип двигателя | s, % | Tм/Tн | ||
| 0,75 | 19 | 71А2 | 5,9 | 2,2 | 71В4 | 7,5 | 2,2 | 80А6 | 8,4 | 2,2 | 90LA8 | 8,4 | 1,9 |
| 1,1 | 19 | 71В2 | 6,3 | 2,2 | 80А4 | 5,4 | 2,2 | 80В6 | 8,0 | 2,2 | 90LB8 | 7,0 | 1,9 |
| 1,5 | 22 | 80А2 | 4,2 | 2,6 | 80B4 | 5,8 | 2,2 | 90L6 | 6,4 | 2,2 | 100L8 | 7,0 | 1,9 |
| 2,2 | 22 | 80В2 | 4,3 | 2,6 | 90L4 | 5,1 | 2,4 | 100L6 | 5,1 | 2,2 | 112MА8 | 6,0 | 2,2 |
| 3,0 | 24 | 90L2 | 4,3 | 2,5 | 100S4 | 4,4 | 2,4 | 112MА6 | 4,7 | 2,5 | 112M8 | 5,8 | 2,2 |
| Примечание. В колонке «s» приведено номинальное скольжение в %, а в колонке «Tм/Tн» — отношение максимального момента к номинальному. Для всех типов отношение пускового и номинального моментов приблизительно равно Тпуск/Тн ≈ 2. Номинальная частота вращения nном рассчитывается по формуле: nном = nс(1 − s). Принятые обозначения: Tм = Tдв.max, Tн = Tдв.ном, Tпуск = Tдв.пуск. | |||||||||||||
В заводских каталогах дополнительно указывают коэффициент λm = Tдв.max/Tдв.ном, который характеризует кратность максимального момента двигателя относительно номинального. Эта величина особенно важна при оценке перегрузочной способности привода и при подборе двигателя для механизмов с переменной нагрузкой.
Для электродвигателей, рассчитанных на кратковременный режим функционирования, в технической документации указывают соответствующую мощность Рдв30 и Рдв60, что соответствует стандартной длительности непрерывной работы в 30 и 60 минут. Эти значения позволяют правильно оценить тепловую нагрузку на машину и исключить преждевременный перегрев при заданной продолжительности цикла.
При выборе двигателей, работающих в повторно-кратковременном режиме, ориентируются на мощность Рдв.пв, которая задается в зависимости от стандартной продолжительности включения. В отечественных каталогах предусмотрен ряд нормированных значений ПВСТ = 15, 25, 40, 60%. Эти данные обеспечивают возможность точного сопоставления расчетной и номинальной мощности и выбора двигателя по реальным условиям работы оборудования.
Примечание. Следует учитывать, что в большинстве действующих каталогов электродвигателей параметры по-прежнему приводятся в системе МКГСС (метр-килограмм-секунда-сила). Поэтому при проектировании требуется приведение значений к международной системе СИ в соответствии с ГОСТ 8.417-2002, регламентирующим единицы физических величин.
Асинхронные электродвигатели, приведенные в табл. 2, обладают так называемой «жесткой» механической характеристикой. Это означает, что даже при значительных колебаниях нагрузки изменение частоты вращения ротора оказывается минимальным. На практике принимается упрощение: в рабочем диапазоне нагрузок (за исключением момента пуска) скорость вращения ротора пдв ≈ const. Тогда частота вращения двигателя напрямую связывается с частотой вращения рабочего органа (р0):
![]()
где uмп — передаточное число механической передачи.
Выбор двигателя из каталога выполняется по номинальной мощности с учетом расчетного режима привода. Основное условие имеет вид:
Рдв.ном > Рдв.расч,
где Рдв.расч — расчетная мощность, определяемая с учетом реального теплового режима эксплуатации. Одновременно подбирается частота вращения, обеспечивающая согласованность с рабочим органом.
Для электроприводов выделяют три ключевых режима эксплуатации, каждый из которых требует отдельной проверки: длительный, кратковременный и повторно-кратковременный.
Длительный режим работы описывается как такой режим, при котором время функционирования достаточно велико для выхода двигателя на установившуюся температуру нагрева. Если нагрузка изменяется, реальный переменный момент заменяют эквивалентным среднеквадратичным значением ТЕ. В случае постоянной нагрузки ТЕ = Тдв.расч.
Мощность двигателя при предположении постоянной скорости ротора определяется по зависимости:
![]()
где ωро — угловая скорость рабочего органа, рад/с; ηмп — коэффициент полезного действия передачи. При переменной нагрузке изменением ηмп часто пренебрегают и принимают:
![]()
В этом случае двигатель выбирается по условию Рдв.ном ≥ Рдв.расч. Это обеспечивает стабильность температурного режима и отсутствие преждевременного старения изоляции.
Кратковременный режим работы применяется, если фактическая работа под нагрузкой ограничивается промежутком 10 ≤ tT ≤ 60 мин. За это время двигатель не успевает прогреться до установившейся температуры, а паузы между циклами достаточно продолжительны для выравнивания теплового состояния машины и окружающей среды.
Эквивалентный момент ТЕ в этом режиме рассчитывают как среднеквадратичное значение:
где Tn и tn — уровень нагрузки и время его действия, tц — полный цикл.
Расчетная мощность определяется по формуле:
Рдв.расч = TЕωро/ηмн,
где ηмн — КПД передачи.
Повторно-кратковременный режим работы отличается большим числом включений и остановок. При этом двигатель не достигает установившейся температуры за время работы fT, а за паузу t=0 не успевает полностью остыть до температуры окружающего воздуха.
Продолжительность одного цикла составляет:
fT + fT=0 ≤ 10 мин = 100%.
Фактическая продолжительность включения (%) вычисляется по выражению:
Для правильного выбора двигателя из каталога выбирается ближайшее стандартное значение ПВСТ к расчетному ПВФ. Расчетная мощность в этом режиме равна:
Условие подбора формулируется как:
Рдв.пв ≥ Рдв.расч.пв.
Это исключает перегрев при многократных пусках.
Проверка двигателя на перегрузку имеет целью предотвратить так называемое «опрокидывание» — резкую остановку при внезапном росте нагрузки. В расчетах принимается неблагоприятная ситуация: снижение напряжения сети на 10% (что эквивалентно падению электромагнитного момента примерно на 19%) и одновременное достижение рабочим органом максимального момента:
где λm = Tдв.max / Тдв.ном для выбранного двигателя; Тmax — наибольший момент нагрузки.
Если указанное условие не выполняется, расчетная мощность уточняется и принимается равной:
Это гарантирует дополнительный тепловой запас.
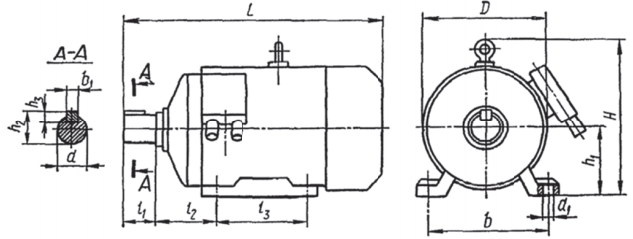
Таблица 3. Основные габаритные, установочные и присоединительные размеры асинхронных электродвигателей серии 4А закрытого обдуваемого исполнения по ГОСТ 19523-81 (выборка)
 |
|||||||||||||
| Тип двигателя | d | L | Н | D | l1 | l2 | l3 | d1 | b | h1 | h2 | h3 | Масса |
| 71 | 19 | 285 | 201 | 170 | 40 | 45 | 90 | 7 | 112 | 71 | 21,5 | 6 | 15,1 |
| 80А | 22 | 300 | 218 | 186 | 50 | 50 | 100 | 10 | 125 | 80 | 24,5 | 6 | 17,5 |
| 80В | 22 | 320 | 218 | 186 | 50 | 50 | 100 | 10 | 125 | 80 | 24,5 | 6 | 20,0 |
| 90L | 24 | 350 | 243 | 208 | 50 | 56 | 125 | 10 | 140 | 90 | 27,0 | 7 | 28,7 |
| 100S | 28 | 365 | 265 | 235 | 60 | 63 | 112 | 12 | 160 | 100 | 31,0 | 7 | 36 |
| 100L | 28 | 395 | 280 | 235 | 60 | 63 | 140 | 12 | 160 | 100 | 31,0 | 7 | 42 |
| 112М | 32 | 452 | 310 | 260 | 80 | 70 | 140 | 12 | 190 | 112 | 35,0 | 8 | 56 |
| 132S | 38 | 480 | 350 | 302 | 80 | 89 | 140 | 12 | 216 | 132 | 41,0 | 8 | 71 |
| 132М | 38 | 580 | 350 | 302 | 80 | 89 | 178 | 12 | 216 | 132 | 41,0 | 8 | 93 |
| 160S | 42 | 624 | 430 | 358 | 110 | 108 | 178 | 15 | 254 | 160 | 45 | 8 | 130 |
| 160M | 42 | 667 | 430 | 358 | 110 | 108 | 210 | 15 | 254 | 160 | 45 | 8 | 145 |
| 180S | 48 | 662 | 470 | 410 | 110 | 121 | 203 | 15 | 279 | 180 | 51,5 | 9 | 165 |
| 180M | 48 | 702 | 470 | 410 | 110 | 121 | 241 | 15 | 279 | 180 | 51,5 | 9 | 185 |
| 200M | 55 | 760 | 535 | 450 | 110 | 133 | 267 | 19 | 318 | 200 | 59 | 10 | 255 |
| 200L | 55 | 800 | 535 | 450 | 110 | 133 | 305 | 19 | 318 | 200 | 59 | 10 | 280 |
| 225M | 55 | 810 | 575 | 494 | 110 | 149 | 311 | 19 | 356 | 225 | 59 | 10 | 355 |
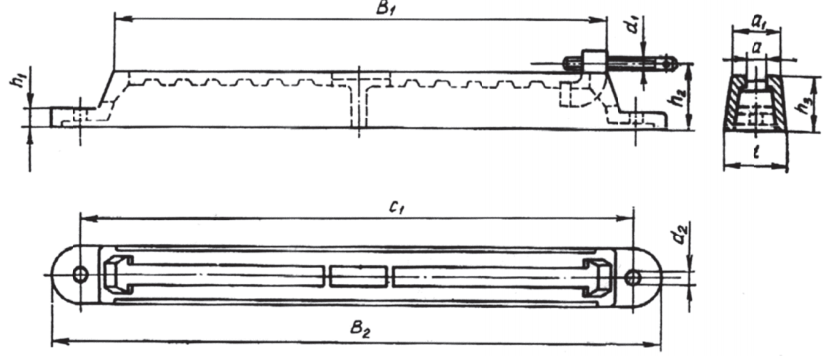
Для установки и регулировки положения электродвигателя применяют салазки, которые крепят к платикам плиты (табл. 4).
Таблица 4. Салазки для крепления электродвигателя
 |
||||||||||||||||||
| а | а1 | В1 | В2 | C1 | d1 | d2 | h1 | h2 | h3 | l | Масса, кг | Болты | ||||||
| 16 | 38 | 370 | 440 | 410 | M12 | 12 | 15 | 44 | 36 | 42 | 3,8 | М10Х35 | ||||||
| 18 | 45 | 430 | 510 | 470 | M12 | 14 | 18 | 55 | 45 | 50 | 5,3 | М12Х40 | ||||||
| 25 | 65 | 570 | 670 | 620 | M16 | 18 | 22 | 67 | 55 | 72 | 12,5 | М16Х55 | ||||||
| 25 | 65 | 630 | 770 | 720 | M16 | 18 | 26 | 74 | 60 | 75 | 17,5 | М16Х60 | ||||||
| 30 | 90 | 770 | 930 | 870 | M20 | 24 | 30 | 88 | 70 | 105 | 31 | М20Х75 | ||||||
2. Определение передаточного отношения всего привода
При проектировании любого привода первым шагом является определение исходных параметров рабочего органа машины. Обычно задают частоту вращения nр (мин-1) приводного вала. В ряде случаев вместо частоты могут быть заданы геометрические или кинематические характеристики рабочего органа, например диаметр барабана конвейера D (м) и линейная скорость движения ленты v (м/с). В этом случае требуемая частота вращения рассчитывается по выражению:
nр = 60 v / πD.
Такой подход отражает общий принцип кинематического анализа: от характеристик рабочего органа переходят к параметрам вала, а далее – к подбору двигателя и трансмиссии.
Далее определяется общее передаточное отношение всего привода. Оно выражается формулой:
u = nном / nр,
где nном – номинальная частота вращения выбранного электродвигателя. На этом этапе важно помнить, что результативность дальнейших расчетов зависит от правильного выбора двигателя, поскольку именно его частота диктует требуемую степень трансформации скорости.
Общее передаточное отношение разлагают на произведение частных передаточных чисел отдельных передач, входящих в привод:
u = u1 · u2 · … · uk.
На практике рекомендуется использовать ориентировочные усредненные значения uk, характерные для различных типов передач: зубчатых, червячных, ременных, цепных и др. Эти ориентиры приведены в табл. 1 и позволяют избежать как завышенных, так и заниженных нагрузок на отдельные элементы привода. Согласно ГОСТ 2185-66 и ГОСТ 9563-60 такие диапазоны подбираются с учетом эксплуатационной надежности.
Пример. Рассмотрим кинематический расчет привода. Исходные данные: диаметр барабана D = 500 мм; тяговое усилие ленты F = 4·103 Н; скорость движения v = 0,8 м/с.
Задача: выбрать асинхронный трехфазный электродвигатель, определить общее передаточное отношение всего привода и установить оптимальные частные передаточные отношения каждой передачи.
Этап 1. Определение КПД привода.
Для расчета примем значения коэффициентов полезного действия по табл. 1:
η1 = 0,98 – для ременной передачи;
η2 = 0,98 – для зубчатой пары;
η3 = 0,96 – для цепной передачи;
потери в опорах трех валов учитываются коэффициентом η03 = 0,993.
Тогда общий КПД привода равен:
η = η1 · η2 · η3 · η03 = 0,98 · 0,98 · 0,96 · 0,993 = 0,89.
Этап 2. Мощность двигателя.
Расчетная мощность двигателя по формуле:
P = Fv / η = 4·103 · 0,8 / 0,89 = 3,6·103 Вт.
Таким образом, требуется электродвигатель мощностью около 3,6 кВт с учетом потерь.
Этап 3. Определение частоты вращения барабана.
nр = 60v / πD = 60 · 0,8 / (3,14 · 0,5) = 30,5 мин-1.
Этап 4. Подбор двигателя.
Согласно табл. 3 (ГОСТ 19523-81) подходят электродвигатели трех типоразмеров:
– 4A100S2P, P = 4 кВт, nс = 3000 мин-1, s = 3,3%;
– 4A100L4, P = 4 кВт, nс = 1500 мин-1, s = 4,7%;
– 4A112MB6, P = 4 кВт, nс = 1000 мин-1, s = 5,1%.
Использование двигателя с nс = 3000 мин-1 требует передаточного числа порядка 100, что технически усложняет конструкцию. Поэтому более целесообразны варианты с nс = 1500 и 1000 мин-1.
Номинальные частоты вращения при скольжении s:
а) nном = nс(1 – s) = 1500 (1 – 0,047) = 1430 мин-1;
б) nном = 1000 (1 – 0,051) = 949 мин-1.
Этап 5. Определение передаточного отношения.
Для варианта «а»:
u = nном / nр = 1430 / 30,5 ≈ 47.
Для варианта «б»:
u = 949 / 30,5 ≈ 31,1.
Этап 6. Разбивка общего передаточного числа.
На практике разбивка может быть различной. Для примера:
– вариант «а»: u1 = 2,5; u2 = 5; u3 = 3,8; u = 2,5 · 5 · 3,8 = 47,5;
– вариант «б»: u1 = 2; u2 = 4; u3 = 3,9; u = 2 · 4 · 3,9 = 31,2.
Разбивку уточняют на стадии проектирования, при этом допустимое отклонение от расчетного передаточного числа не должно превышать ±3% (согласно ГОСТ 21354-87).
Заключение
Правильное определение передаточного отношения и подбор электродвигателя – это основа эффективной работы всего привода. Последовательный расчет, включающий учет КПД отдельных звеньев, проверку мощности двигателя и разбивку общего передаточного числа на частные передачи, позволяет достичь высокой надежности механизма и минимизировать энергетические потери.
Приведенный пример наглядно показывает, что расчет привода — это не только формулы, но и выбор оптимальных конструктивных решений. Использование нормативных значений КПД, проверка отклонений передаточных чисел в пределах ±3% и учет стандартов ГОСТ позволяют проектировать приводы, соответствующие современным требованиям эксплуатации.
Таким образом, применение представленной методики дает инженеру готовый инструмент для точного и обоснованного проектирования приводных систем различного назначения.
