Современные автомобили оснащаются множеством электронных систем, повышающих безопасность движения. Одной из таких систем является MSR (Motor Schleppmoment Regelung) — система регулирования момента торможения двигателем. Она предотвращает блокировку или проскальзывание ведущих колес при резком сбросе газа или переключении на пониженную передачу, особенно в условиях низкого сцепления. MSR работает совместно с системой ABS/ASR и управлением дроссельной заслонкой двигателя, обеспечивая устойчивость автомобиля в критических режимах движения. В данной статье подробно рассмотрен принцип работы системы MSR, условия ее активации, конструктивные особенности и значение для повышения активной безопасности автомобиля.
Первые попытки реализации контроля над проскальзыванием колес при торможении двигателем предпринимались еще в 1980-х годах, параллельно с развитием систем ABS и ASR. С ростом мощности двигателей и увеличением массы транспортных средств возникла необходимость компенсировать отрицательные эффекты, возникающие при переключении передач вниз или резком сбросе газа. Система MSR была впервые внедрена в серийное производство на автомобилях концерна Volkswagen в конце 1990-х годов. Позднее она стала стандартом и у других автопроизводителей, как элемент расширенного пакета систем активной безопасности.
Система торможения двигателем (Motor Schleppmoment Regelung, MSR) распознает начинающееся проскальзывание ведущих колес, вызванное моментом торможения двигателем, и отдает двигателю команду увеличить крутящий момент так, чтобы прекратить проскальзывание колес. Тем самым длительность фаз проскальзывания колес уменьшается, и управляемость автомобиля восстанавливается.
Во время движения водитель снимает ногу с педали акселератора, чтобы переключиться на понижающую передачу. При этом передающийся на колеса момент торможения двигателем может, при неблагоприятном сочетании дорожных условий, вызвать проскальзывание колеса, что может привести к его блокированию.
MSR предотвращает такое развитие ситуации и уменьшает тормозящее влияние двигателя, увеличивая его крутящий момент. Тем самым MSR обеспечивает устойчивость и управляемость автомобиля. Когда водитель во время движения снимает ногу с педали акселератора, развиваемый двигателем и передаваемый на ведущие колеса крутящий момент уменьшается. При этом силы трения в элементах трансмиссии и в самом двигателе приводят к тому, что на колеса действует не тяговый крутящий момент, а момент торможения двигателем. Этот эффект известен под названием «торможение двигателем».
Момент торможения двигателем, воспринимаемый колесами так же, как и тормозящий момент тормозов, противостоит тяговому крутящему моменту двигателя. Если одновременно с этим происходит переключение на понижающую передачу, то момент торможения двигателем усиливается.
На автомобилях с двигателями большой мощности момент торможения двигателем может, при неблагоприятном сочетании условий, вызвать блокирование или настолько интенсивное проскальзывание колес, что они потеряют способность воспринимать боковые усилия и автомобиль утратит управляемость.
Система MSR (рис. 1) задействуется при выполнении следующих условий:
- педаль акселератора не нажата;
- колеса ведущей оси проскальзывают или блокируются;
- включена передача;
- включено сцепление.
Для установки системы MSR необходимо наличие компонентов системы ABS и интерфейса для подключения к системе управления двигателем. Программное обеспечение ABS дополняется соответствующим расширением MSR.
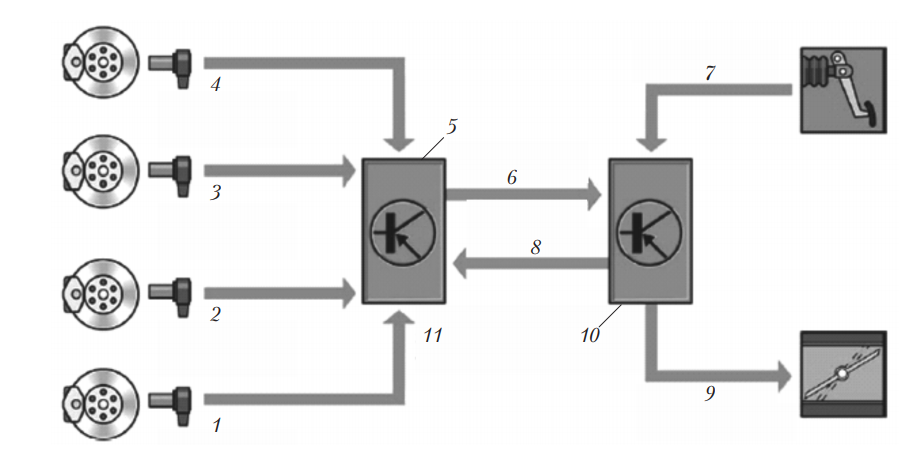
Рис. 1. Схема действия системы MSR: 1 — датчик частоты вращения задний правый; 2 — датчик частоты вращения задний левый; 3 — датчик частоты вращения передний правый; 4 — датчик частоты вращения передний левый; 5, 10 — блок управления двигателем; 6 — запрос требуемого крутящего момента; 7 — положение педали акселератора; 8 — информация о фактическом крутящем моменте; 9 — управление дроссельной заслонкой; 11 — блок управления ABS/ASR
На основании данных от датчиков угловой скорости колес и необходимых данных от системы управления двигателем (например, частоты вращения коленчатого вала двигателя, положения дроссельной заслонки/педали акселератора) система ABS с функцией MSR устанавливает, имеет ли место проскальзывание ведущих колес вследствие снижения крутящего момента двигателя при резком уменьшении нажатия педали акселератора. Если это имеет место, то блок управления ABS/ASR передает эту информацию блоку управления двигателем, который исходя из нее рассчитывает необходимую частоту вращения коленчатого вала двигателя.
Для увеличения частоты вращения коленчатого вала двигателя по запросу MSR блок управления двигателем кратковременно открывает дроссельную заслонку до тех пор, пока проскальзывание колес не войдет в допустимый диапазон. При этом система поддерживается в диапазоне, позволяющем оптимально использовать момент торможения двигателем и одновременно обеспечивающем достаточный запас сцепления для восприятия колесами боковых усилий. Нажатие на педаль акселератора отключает систему торможения двигателем.
Интересные факты:
-
MSR работает в противоположной логике по отношению к ASR: если ASR уменьшает подачу топлива при пробуксовке, то MSR, наоборот, увеличивает крутящий момент при его недостатке.
-
Система MSR особенно эффективна зимой: на обледенелом или мокром покрытии она предотвращает потерю сцепления при включении пониженной передачи.
-
Срабатывание MSR практически незаметно водителю, однако оно существенно влияет на управляемость автомобиля в критических условиях.
-
В гибридных и электромобилях подобная функция реализуется не через дроссельную заслонку, а через алгоритмы рекуперации и управления электродвигателем.
-
MSR активна только при отпущенной педали акселератора, что делает ее частью «пассивного контроля» над автомобилем.
Система MSR представляет собой важный компонент современной архитектуры активной безопасности автомобиля. Ее основная функция — предотвращение проскальзывания ведущих колес в результате торможения двигателем при резком сбросе газа или переключении на пониженную передачу. Благодаря интеграции с ABS и блоком управления двигателем, MSR обеспечивает устойчивость, управляемость и предотвращает возможное заносное поведение автомобиля. Особенно значима работа MSR в условиях плохого сцепления, где даже незначительное проскальзывание колес может привести к потере контроля над транспортным средством. Внедрение и развитие систем, подобных MSR, делает управление автомобилем более безопасным и прогнозируемым даже для неопытных водителей.
Регулярно публикую материалы о передовых методах обработки и сварки материалов, а также освещаю новинки в сфере производства,материаловедения, строительства и др.