Электрический привод – это электромеханическая система, состоящая из электродвигательного, преобразовательного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением. Для выполнения этих функций электропривод вырабатывает механическую энергию за счет электрической энергии, получаемой от источника электрической энергии (сети электроснабжения).
Вырабатываемая электроприводом механическая энергия передается исполнительным органам рабочих машин и механизмов (ленте транспортера или конвейера, шпинделю токарного станка, крыльчатке насоса, кабине лифта и т. д.) и при необходимости регулируется в соответствии с технологическими требованиями к режимам работы исполнительного органа.
За счет полученной энергии исполнительный орган совершает требуемое механическое движение, обеспечивая выполнение производственных и технологических операций: перемещение грузов, обработку деталей, транспортирование жидкости и газа и т. д. Функциональная схема электропривода представлена ниже.
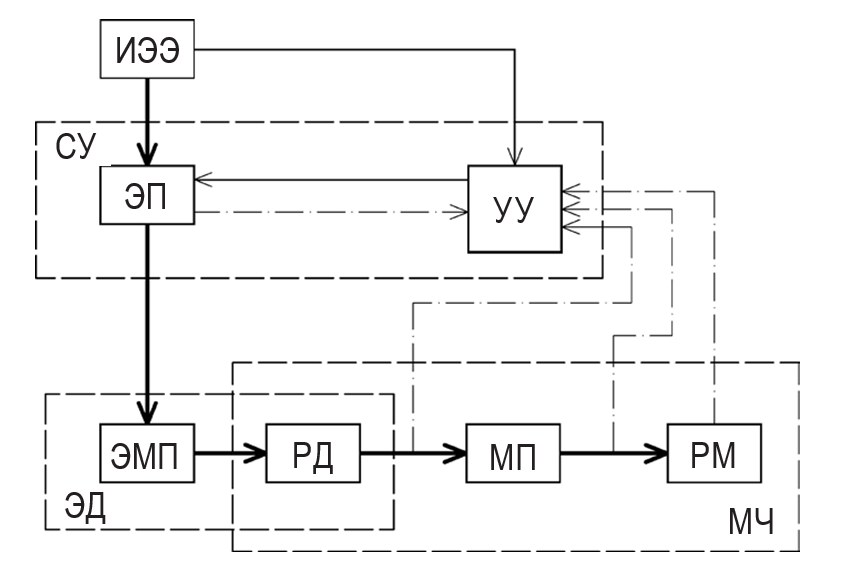
Функциональная схема электропривода: ИЭЭ – источник электрической энергии; СУ – система управления; ЭП – электрический преобразователь; УУ – управляющее устройство; ЭМП – электромеханический преобразователь; РД – ротор двигателя; МП – механический преобразователь; РМ – рабочая машина; ЭД – электрический двигатель; МЧ – механическая часть
Электропривод имеет два канала – силовой и информационный. По первому каналу транспортируется преобразуемая энергия (толстые линии), по второму осуществляются управление потоком энергии (тонкие сплошные линии), а также сбор и обработка сведений о состоянии и функционировании системы, диагностика ее неисправностей (тонкие штрихпунктирные линии).
Силовой канал состоит из двух частей – электрической и механической и обязательно содержит связующее звено – электромеханический преобразователь (ЭМП).
В электрическую часть силового канала входят устройства, передающие электрическую энергию от ее источника (ИЭЭ) к электромеханическому преобразователю и обратно и осуществляющие, если нужно, преобразование параметров электрической энергии. Механическая часть состоит из ротора двигателя (РД), подвижного органа электромеханического преобразователя, механических передач (МП), редуктора или вариатора и исполнительного органа рабочей машины (РМ), в котором полезно реализуется полученная механическая энергия.
В связи с большим ассортиментом рабочих машин электроприводы разнообразны по своему схемному и конструктивному исполнению.
По характеру движения различают электроприводы вращательного и поступательного однонаправленного и реверсивного движения, а также возвратно-поступательного движения.
Вращательное однонаправленное и реверсивное движение осуществляется электродвигателями обычного исполнения.
Поступательное движение может быть получено при использовании электродвигателя вращательного движения совместно с преобразовательным механизмом (кулисным, винтовым, реечным) либо электродвигателя специального исполнения (линейного, гидродинамического и т. д.).
По степени управляемости электроприводы подразделяют на следующие виды:
- нерегулируемый – электропривод, в котором исполнительный орган рабочей машины приводится в движение с одной постоянной скоростью;
- регулируемый – электропривод, в котором скорость движения исполнительного органа изменяется в соответствии с требованиями технологического процесса;
- следящий – электропривод, в котором воспроизводится перемещение исполнительного органа в соответствии с произвольно меняющимся задающим сигналом;
- программно-управляемый – электропривод обеспечивает перемещение исполнительного органа в соответствии с заданной программой;
- адаптивный – электропривод автоматически обеспечивает оптимальный режим движения исполнительного органа при изменении условий его работы;
- позиционный – электропривод обеспечивает регулирование положения исполнительного органа рабочей машины.
По наличию механического преобразователя электроприводы делят на редукторные (электропривод, механическая передача которого содержит редуктор) и безредукторные (электропривод, электродвигатель которого непосредственно соединен с исполнительным органом).
По виду силового электрического преобразователя различают:
- вентильный электропривод, в котором преобразовательным устройством является вентильный преобразователь энергии. Разновидность вентильного электропривода – полупроводниковый электропривод (тиристорный и транзисторный);
- систему УВ–Д – вентильный электропривод постоянного тока, преобразовательным устройством которого является управляемый выпрямитель;
- систему ПЧ–Д – вентильный электропривод переменного тока, преобразовательным устройством которого является регулируемый преобразователь частоты;
- систему Г–Д и МУ–Д – электропривод, преобразовательным устройством которого является соответственно электромашинный преобразователь или магнитный усилитель.
По роду тока различают электроприводы постоянного и переменного тока.
По способу передачи механической энергии исполнительному органу электроприводы подразделяют на следующие виды:
- индивидуальный – электропривод, в котором каждый исполнительный орган рабочей машины приводится в движение отдельным двигателем. Это наиболее распространенный вид электропривода, так как здесь упрощается кинематическая передача (в некоторых случаях она полностью исключена), легко осуществляется автоматизация технологического процесса, улучшаются условия обслуживания рабочей машины;
- взаимосвязанный – электропривод, в котором имеются два или несколько электрически или механически связанных между собой электроприводов, при работе которых поддерживается заданное соотношение их скоростей или нагрузок и положение исполнительных органов рабочих машин. Если электродвигатели взаимосвязанного электропривода работают на общий вал, привод называют многодвигательным;
- групповой – электропривод с одним электродвигателем, обеспечивающий движение исполнительных органов нескольких рабочих машин или нескольких исполнительных органов одной рабочей машины.
По уровню автоматизации различают:
- неавтоматизированный электропривод, в котором осуществляется ручное управление с помощью оператора;
- автоматизированный – электропривод, управляемый автоматическим регулированием параметров;
- автоматический – электропривод, в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
История электропривода и основные направления его развития
В период с 1819 по 1834 год были сформулированы важнейшие принципы, положенные в основу современной электротехники. Среди них – закон Эрстеда, описывающий влияние постоянного электрического тока на магнитную стрелку, и открытие Ампера о взаимодействии электрических токов. Затем последовали фундаментальные открытия Ома, установившего количественную зависимость между током, напряжением и сопротивлением в электрической цепи, а также Фарадея, который выявил механизм электромагнитной индукции. Закон Ленца, описывающий направление индуцированной ЭДС, завершил формирование основ электротехники.
Первые образцы электродвигателей появились в 1830-х годах. Один из первых практически пригодных двигателей постоянного тока был создан в 1834 году Морицем Германом в Германии. Конструкция устройства включала две группы электромагнитов П-образной формы. Из них четыре неподвижных были подключены последовательно и питались от батареи гальванических элементов.
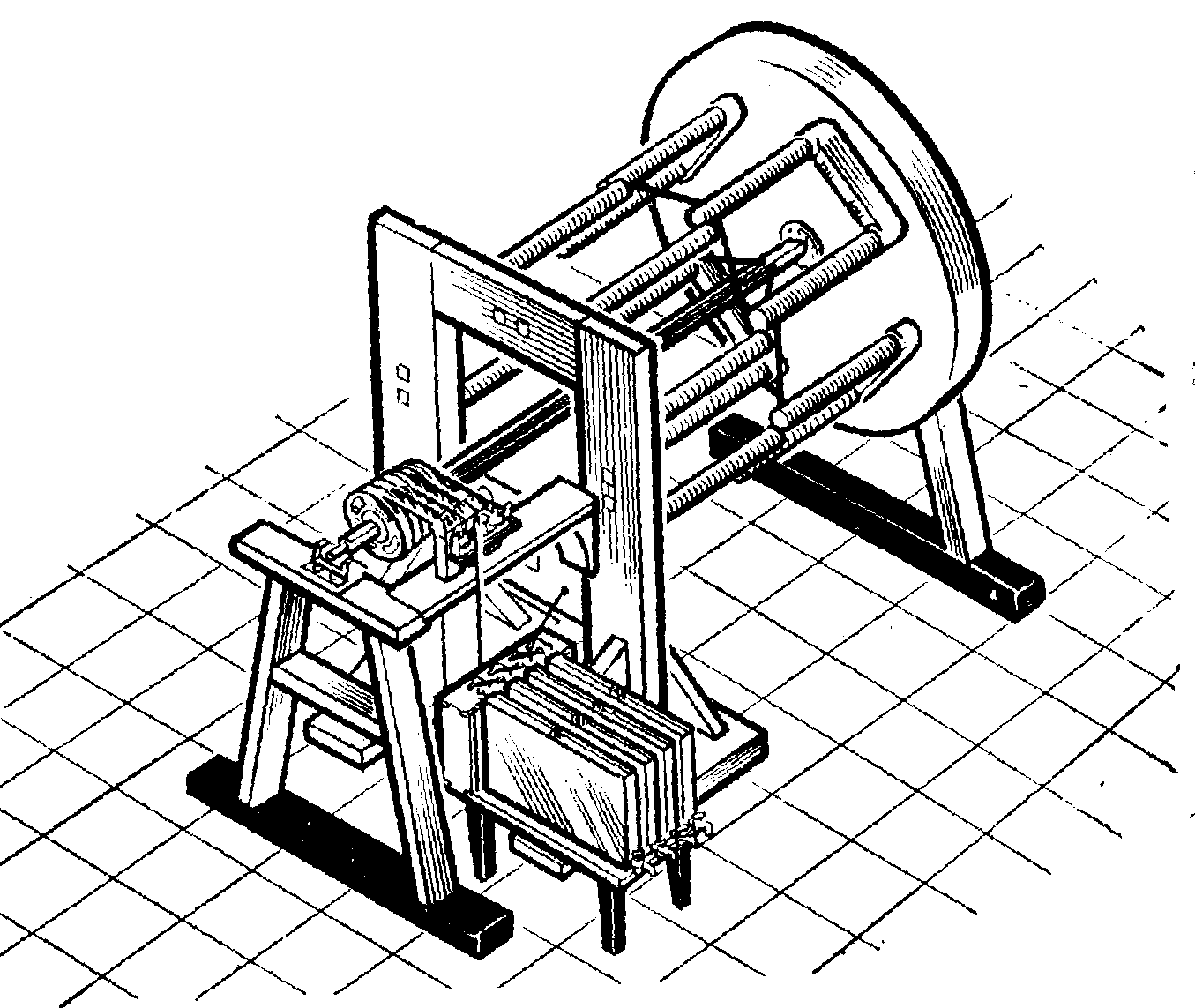
На подвижном элементе – диске – были установлены еще четыре электромагнита, получающие питание через коммутатор, который восемь раз за оборот изменял направление тока. Из-за значительного воздушного зазора (12,7 мм) между обмотками эффективность устройства была ограничена. При мощности порядка 15 Вт электродвигатель развивал скорость 80–120 об/мин.
В 1837–1839 годах в России Мориц Герман, выступая под псевдонимом Б.С. Якоби, разработал и продемонстрировал несколько вариантов электроприводов для гребных лодок. Один из лучших прототипов развивал мощность 650 Вт, что позволяло передвигать судно со скоростью 4 км/ч по течению и 2,5 км/ч против него, перевозя до 14 человек. Однако низкая эффективность и малая емкость гальванических источников энергии затормозили массовое внедрение этих систем.
Со временем электромеханические устройства стали совершенствоваться. В 1860 году итальянским ученым А. Пачинотти была предложена конструкция двигателя с кольцевым якорем. Затем, в 1867 году, Э.В. Сименс разработал генератор постоянного тока, работающий на принципе электромагнитного самовозбуждения. Открытие промышленного генератора Зенобом Граммом в 1870 году дало старт широкому применению двигателей постоянного тока в промышленности.
Уже к 1880 году российский инженер Ф.А. Пироцкий успешно применил двигатель постоянного тока для движения трамвайного вагона. Это стало первым шагом в направлении развития электрического транспорта. Вскоре, в 1881 году, в пригороде Берлина начала функционировать первая трамвайная линия, а спустя год – троллейбусная линия, обе на постоянном токе.
Развитие технологий переменного тока стало следующим этапом. В 1886 году Г. Феррарис предложил концепцию вращающегося магнитного поля и разработал принципы многофазных машин переменного тока, включая системы с шестью фазами. Далее, в 1889–1891 годах, инженер М.О. Доливо-Добровольский предложил и внедрил трехфазную систему переменного тока, включающую трансформаторы и асинхронные двигатели. Это позволило эффективно передавать электрическую энергию на значительные расстояния и трансформировать ее в напряжения разной величины.
Развитие электроприводов переменного тока стало происходить стремительно. Примечательно, что уже в 1880 году в журнале «Электричество» появилась статья Д.А. Лачинова «Электромеханическая работа», отражающая суть электропривода как системы, превращающей электрическую энергию в механическую.
Значительный вклад в развитие теории и практики электроприводов внесли отечественные ученые: С.А. Ринкевич, В.К. Попов, А.Т. Голован, М.Г. Чиликин, Д.П. Морозов, А.С. Сандлер, В.П. Андреев, Ю.А. Сабинин, Л.Б. Гейлер, С.Н. Вешеневский, Н.Ф. Ильинский и многие другие. Особенно важную роль сыграл Всесоюзный научно-исследовательский институт «ВНИИэлектропривод», где проводились фундаментальные и прикладные исследования в этой области.
Сегодня развитие электроприводов ориентировано на повышение точности регулирования и автоматизацию управления. Современные производственные системы предъявляют высокие требования к динамическим характеристикам электроприводов. В связи с этим разрабатываются цифровые системы управления на базе микропроцессоров и используются алгоритмы числового программного управления, значительно расширяющие функциональные возможности.
Другим важным вектором развития стало упрощение кинематических цепей в промышленных механизмах. Этому способствует повсеместное внедрение регулируемых индивидуальных электроприводов. Особенно перспективным направлением является создание безредукторных приводов, позволяющих отказаться от механических передач при сохранении высокой надежности и отклика.
Развитие линейных электродвигателей стало логичным продолжением этой тенденции. Такие двигатели исключают необходимость применения преобразующих механизмов, обеспечивая прямолинейное движение исполнительных органов машин. Они становятся частью конструкции самой машины, упрощают компоновку и улучшают технологичность изготовления оборудования.
Также нельзя обойти стороной еще одно важнейшее направление – энергосбережение. Рациональное проектирование с акцентом на снижение энергетических потерь становится приоритетом. Согласно расчетам, экономия одной тонны условного топлива обходится дешевле, чем его добыча, и в будущем эта разница будет увеличиваться по мере истощения природных ресурсов.
Таким образом, развитие электроприводов охватывает множество аспектов – от совершенствования конструкций и внедрения новых типов двигателей до создания интеллектуальных систем управления и повышения энергетической эффективности.