Содержание страницы
- Физические основы пьезоэлектрического эффекта
- Ключевые пьезоэлектрические материалы
- Конструктивные элементы: от пьезоэлемента до преобразователя
- Преимущества и недостатки пьезоэлектрических приводов
- Пьезодвигатели: новое слово в технологии приводов
- Применение пьезотехнологий: от макромира до наноуровня
- Интересные факты о пьезоэлектричестве
- FAQ: Часто задаваемые вопросы о пьезоэлектричестве
- Заключение
Способность некоторых материалов преобразовывать механическую энергию в электрическую и наоборот, известная как пьезоэлектрический эффект, является одним из самых удивительных и практически значимых явлений в современной физике и инженерии. Термин «пьезо» происходит от греческого слова πιέζειν (piezein), что означает «давить» или «сжимать», и это название идеально отражает суть процесса.
Эта уникальная взаимосвязь между механическими и электрическими свойствами вещества лежит в основе работы бесчисленного множества устройств: от простых зажигалок и звукоснимателей до высокоточных приводов в космических телескопах и сканирующих туннельных микроскопах, позволяющих «видеть» отдельные атомы. В этой статье мы подробно рассмотрим физические основы этого явления, ключевые материалы, конструктивные особенности пьезоэлектрических элементов и их впечатляющие применения в самых разных областях науки и техники.
Краткая история и суть открытия
Фундаментальное открытие пьезоэлектричества было сделано в 1880 году французскими физиками, братьями Пьером и Жаком Кюри. В ходе своих систематических исследований кристаллографии они обнаружили, что при сжатии или растяжении кристаллов определенного типа, таких как кварц, турмалин и сегнетова соль, на их гранях возникает электрический заряд. Этот феномен они назвали прямым пьезоэлектрическим эффектом. Уже в следующем, 1881 году, основываясь на математических расчетах Габриэля Липпмана, братья экспериментально подтвердили и существование обратного явления: при подаче электрического напряжения на те же кристаллы они изменяли свои геометрические размеры — деформировались. Это явление получило название обратного пьезоэлектрического эффекта.
Физические основы пьезоэлектрического эффекта
Пьезоэффект проявляется исключительно в диэлектриках, которые классифицируются как пьезоэлектрики. К этой категории относятся как природные монокристаллы, так и специально созданные поликристаллические материалы, в первую очередь пьезокерамика, структура которой упорядочивается в процессе предварительной поляризации в сильном электрическом поле.
Механизм пьезоэффекта на микроскопическом уровне объясняется асимметрией кристаллической решетки. В пьезоэлектриках элементарная ячейка кристалла не имеет центра симметрии. Это означает, что центры распределения положительных и отрицательных зарядов ионов в ячейке не совпадают, образуя электрический диполь с определенным дипольным моментом.
- При прямом пьезоэффекте внешнее механическое напряжение T (сжатие или растяжение) деформирует кристаллическую решетку. Это приводит к смещению ионов и, как следствие, к изменению величины и/или направления дипольного момента каждой элементарной ячейки. Суммарный эффект по всему объему материала проявляется как макроскопическая электрическая поляризация Р — на поверхностях кристалла появляются электрические заряды.
- При обратном пьезоэффекте внешнее электрическое поле с напряженностью E воздействует на диполи в элементарных ячейках, заставляя их ориентироваться вдоль поля. Это перемещение заряженных ионов изменяет межатомные расстояния, что приводит к макроскопической деформации S всего материала.
В первом приближении, для не слишком больших воздействий, оба эффекта являются линейными и могут быть описаны следующими фундаментальными уравнениями, соответствующими требованиям ГОСТ Р 56199-2014 «Материалы пьезоэлектрические. Термины и определения»:
Прямой пьезоэффект: P = d · T
Обратный пьезоэффект: S = d · E
Где:
- P – вектор электрической поляризации (измеряется в Кулонах на квадратный метр, Кл/м2).
- T – тензор механического напряжения (Паскаль, Па).
- S – тензор относительной деформации (безразмерная величина).
- E – вектор напряженности электрического поля (Вольт на метр, В/м).
- d – пьезомодуль, ключевая характеристика материала, представляющая собой тензор третьего ранга (измеряется в Кл/Н или м/В). Важно, что его значение одинаково как для прямого, так и для обратного эффекта, что демонстрирует обратимость процесса.
Наглядная схема проявления прямого и обратного пьезоэффектов представлена на рисунке 1.
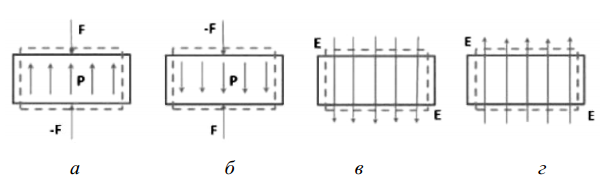
Рис. 1. Схема проявления прямого (а, б) и обратного (в, г) пьезоэффектов: внешние воздействия показаны стрелками Р (механическая сила) и Е (напряженность электрического поля). Исходные контуры пьезоэлектрика обозначены штриховой линией, а контуры после деформации – сплошной (деформация для наглядности многократно увеличена). Р – вектор поляризации.
Ключевые пьезоэлектрические материалы
Природные и синтетические кристаллы
Пьезоэлектрическими свойствами обладают только кристаллы с нецентросимметричной решеткой. Наиболее известные представители:
- Кварц (SiO2): Один из самых распространенных минералов на Земле. Благодаря своей исключительной стабильности, высокому качеству (высокой добротности) и низким потерям, кристаллы кварца, как природные, так и синтетические, незаменимы в качестве эталонов частоты в кварцевых генераторах (часы, компьютеры) и фильтрах.
- Сегнетова соль (NaKC4H4O6·4H2O): Исторически один из первых изученных материалов с очень высоким пьезомодулем, однако ее применение сильно ограничено из-за узкого температурного диапазона существования пьезосвойств, высокой гигроскопичности и механической хрупкости.
- Дигидрофосфат калия (КН2РO4, KDP) и аммония ((NH4)2HPO4, ADP): Эти кристаллы выращиваются искусственно из водных растворов. Они также обладают хорошими пьезоэлектрическими характеристиками, но страдают от общих недостатков, таких как хрупкость и гигроскопичность (поглощение влаги из воздуха), что требует применения специальных защитных покрытий для предотвращения их разрушения.
Пьезокерамика – основа современной пьезотехники
На сегодняшний день абсолютное большинство пьезоэлектрических устройств создается на основе пьезокерамики. По своим физическим свойствам она относится к классу поликристаллических сегнетоэлектриков. Это название происходит от сегнетовой соли, где впервые были обнаружены сегнетоэлектрические свойства.
Сегнетоэлектрики – это уникальные диэлектрики, которые в определенном температурном диапазоне (ниже точки Кюри) обладают спонтанной (самопроизвольной) поляризацией. Их внутренняя структура состоит из доменов — микроскопических областей, в каждой из которых дипольные моменты всех элементарных ячеек ориентированы в одном направлении.
В исходном, неполяризованном состоянии пьезокерамика состоит из множества хаотично ориентированных кристаллитов (зёрен), и направления спонтанной поляризации доменов в них также случайны. В результате суммарный дипольный момент всего образца равен нулю, и пьезоэлектрические свойства не проявляются (рис. 2, а).
Для придания материалу пьезосвойств его подвергают процессу поляризации: образец нагревают до температуры, близкой к точке Кюри (при которой доменная структура становится подвижной), и помещают в сильное постоянное электрическое поле. Под действием поля дипольные моменты доменов ориентируются преимущественно вдоль направления поля (рис. 2, б). После охлаждения и снятия поля эта ориентация в значительной степени сохраняется (остаточная поляризация), и материал приобретает выраженные пьезоэлектрические свойства и полярную анизотропию (рис. 2, в).
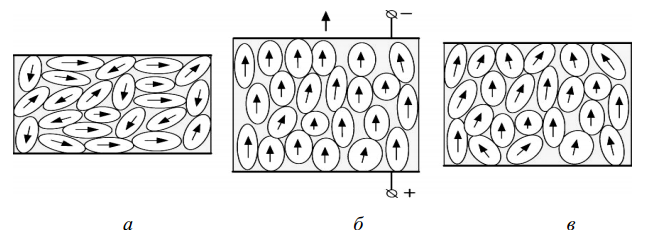
Рис. 2. Схема процесса поляризации пьезокерамики: а – исходное хаотичное состояние доменов; б – ориентация доменов в сильном электрическом поле; в – конечное состояние с остаточной поляризацией после снятия поля.
Варьируя химический состав и добавляя различные легирующие присадки, синтезируют пьезокерамические материалы с широким спектром характеристик, соответствующих требованиям ОСТ 11 044-87 «Материалы пьезокерамические. Технические условия». Большинство из них являются твердыми растворами на основе соединений со структурой типа перовскита (ABO3), например, титанат бария (BaTiO3). Наибольшее распространение получила система ЦТС (цирконат-титанат свинца, PZT) на основе PbTiO3 – PbZrO3, обладающая превосходным сочетанием высокого пьезомодуля, стабильности и широкого рабочего температурного диапазона.
Конструктивные элементы: от пьезоэлемента до преобразователя
Фундаментальным «кирпичиком» любого пьезоэлектрического устройства является пьезопреобразователь. Его активная часть состоит из одного или нескольких пьезоэлементов, которые механически и электрически соединены друг с другом.
Пьезоэлемент — это деталь простой геометрической формы (диск, пластина, кольцо, стержень, цилиндр), изготовленная из пьезоматериала (чаще всего пьезокерамики), на определённые поверхности которой нанесены токопроводящие электроды для подвода или съёма электрического сигнала (рис. 3).

Рис. 3. Примеры пьезоэлементов различной геометрической формы.
Технологический процесс их изготовления сложен и многостадиен:
- Синтез порошка: Исходное сырье (оксиды свинца PbO, титана TiO2, циркония ZrO2 и др.) тщательно смешивается и подвергается высокотемпературной обработке для получения однородного мелкодисперсного порошка заданного химического состава.
- Формование и спекание: Из порошка методами прессования или литья формуются заготовки, которые затем спекаются при высоких температурах (1200-1400 °C). В результате получается плотная, прочная керамическая структура.
- Нанесение электродов и поляризация: На поверхности заготовки наносятся металлические (обычно серебряные) электроды, после чего следует ключевой этап поляризации, описанный выше.
Принцип работы пьезоэлемента
При приложении механической силы (сжатия или растяжения) к поляризованному пьезоэлементу, происходит деформация его кристаллической решетки, что изменяет суммарный дипольный момент. Это, в свою очередь, индуцирует на электродах разность потенциалов — электрическое напряжение (прямой пьезоэффект).
И наоборот, если к электродам пьезоэлемента приложить электрическое напряжение, возникающее электрическое поле вызывает механическое напряжение внутри материала, приводящее к его деформации (обратный пьезоэффект). Направление деформации зависит от полярности приложенного напряжения относительно направления исходной поляризации:
- Если полярность напряжения совпадает с полярностью поляризации, элемент удлиняется и становится тоньше.
- Если полярность напряжения противоположна полярности поляризации, элемент укорачивается и становится толще.
При подаче переменного напряжения элемент начинает циклически удлиняться и укорачиваться с частотой этого напряжения, совершая механические колебания.
Многоэлементные конструкции для расширения возможностей
Одиночный пьезоэлемент способен генерировать очень малые перемещения, обычно в диапазоне от 0,01 до 0,1 мкм. Для решения практических задач, требующих больших амплитуд, пьезоэлементы объединяют в более сложные конструкции.
Пакетные (стековые) преобразователи
Наиболее распространенным решением для получения значительных усилий и увеличения хода являются преобразователи пакетной (стековой) конструкции. Они представляют собой набор из множества тонких пьезоэлементов (дисков или колец), механически соединенных последовательно (склеенных или сжатых) и электрически — параллельно. Число элементов в пакете может варьироваться от нескольких штук до нескольких сотен, что определяется требуемым диапазоном перемещений (рис. 4). Микроскопические перемещения каждого отдельного слоя суммируются, обеспечивая общее перемещение пакета, которое может достигать десятков и даже сотен микрометров.
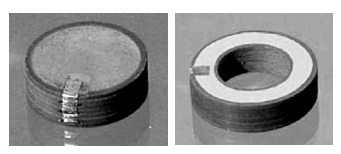
Рис. 4. Пакеты из пьезокерамических дисков и колец.
Многослойные (монолитные) преобразователи
В последние годы всё большее распространение получают тонкопленочные многослойные конструкции. Они изготавливаются по технологии совместного спекания, где тонкие слои пьезокерамического порошка чередуются со слоями пасты, содержащей металл для внутренних электродов. В такой структуре все слои соединены электрически параллельно, а смежные слои поляризованы во встречных направлениях. Это позволяет достигать значительных деформаций при существенно более низких рабочих напряжениях по сравнению с пакетными конструкциями. Однако их недостатком является высокая собственная электрическая емкость, что требует использования мощных драйверов и может ограничивать максимальную скорость работы (быстродействие).
Биморфные преобразователи
Особый интерес представляют биморфные пьезопреобразователи (рис. 5), предназначенные для преобразования продольной деформации в изгибную. Они состоят из двух склеенных между собой пьезоэлектрических пластин или одной пьезопластины, склеенной с пассивной (металлической) подложкой. Напряжение на электроды подается таким образом, чтобы одна пластина расширялась, а другая — сжималась. Это приводит к изгибу всей конструкции, по аналогии с биметаллической пластиной при нагреве. Такие устройства позволяют получать значительно большие линейные перемещения (до нескольких миллиметров) и угловые отклонения (до нескольких градусов).
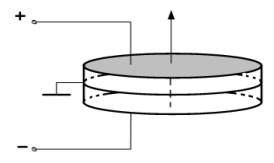
Рис. 5. Схема биморфного пьезокерамического преобразователя.
В зависимости от способа закрепления биморфная конструкция может обеспечивать разные типы движения:
- При консольном закреплении (с одной стороны), свободный конец совершает угловые перемещения (рис. 6, а).
- При закреплении с двух сторон, центральная часть совершает линейные перемещения, равные прогибу конструкции (рис. 6, б).
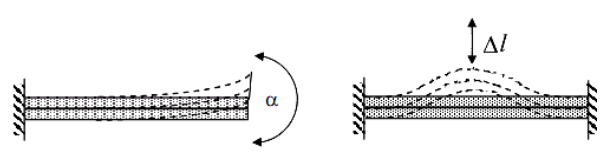
Рис. 6. Биморфные конструкции: а – с угловым перемещением; б – с линейным перемещением.
Сравнение типов пьезопреобразователей
| Характеристика | Пакетные (стековые) | Многослойные (монолитные) | Биморфные |
|---|---|---|---|
| Максимальное перемещение | Среднее (10-200 мкм) | Среднее (10-200 мкм) | Очень большое (до нескольких мм) |
| Развиваемое усилие | Очень высокое (до нескольких кН) | Высокое | Низкое |
| Рабочее напряжение | Высокое (500-1000 В) | Низкое (60-200 В) | Среднее/Высокое |
| Быстродействие | Высокое (низкая ёмкость) | Среднее/Низкое (высокая ёмкость) | Низкое |
| Типичное применение | Силовые приводы, позиционирование, клапаны | Нанопозиционирование, оптика, топливные форсунки | Сканеры, модуляторы, микронасосы, вентиляторы |
Преимущества и недостатки пьезоэлектрических приводов
Пьезопреобразователи (пьезоактуаторы), работающие в режиме обратного пьезоэффекта, составляют основу исполнительных устройств нового поколения.
Преимущества:
- Высочайшее разрешение: Способность позиционирования с точностью до долей нанометра.
- Высокое быстродействие: Время отклика составляет микросекунды.
- Большие усилия: Пакетные актуаторы способны развивать усилия в сотни и тысячи Ньютонов.
- Отсутствие люфта и трения: Движение основано на деформации твердого тела, что исключает механический износ.
- Компактность и малый вес.
- Отсутствие магнитных полей: Позволяет использовать их в чувствительном оборудовании и сильных магнитных полях (МРТ).
- Низкое энергопотребление в статическом режиме (потребляют энергию только при изменении положения).
Недостатки:
- Малый диапазон перемещений (особенно у пакетных конструкций).
- Эффекты гистерезиса и крипа: Деформация нелинейно зависит от приложенного напряжения, а положение может медленно «плыть» со временем при постоянной нагрузке. Для точного позиционирования это требует использования систем с обратной связью.
- Высокое управляющее напряжение (для пакетных актуаторов).
- Хрупкость керамического материала.
- Температурная зависимость характеристик.
Пьезодвигатели: новое слово в технологии приводов
Пьезодвигатели преобразуют высокочастотные микроскопические колебания пьезоэлемента в непрерывное или шаговое макроскопическое движение ротора или линейного ползуна. По конструкции и принципу действия они делятся на два основных типа: вращающиеся и линейные.
Вращающиеся пьезодвигатели
Рассмотрим схему вращающегося пьезодвигателя (рис. 7). Активный статор содержит пьезоэлемент 1 в виде пластины. Один её конец закреплен, а на другом, обращенном к пассивному ротору 2, установлена износостойкая фрикционная накладка 4. Ротор 2 прижимается к статору с силой F, создаваемой упругим элементом 3. При подаче переменного напряжения U на электроды, пьезопластина 1 совершает сложные колебания (например, продольные и изгибные). В результате этих колебаний свободный конец пластины описывает эллиптическую траекторию, толкая ротор в одном направлении в фазе контакта и отходя от него в фазе возврата. Таким образом, электрическая энергия преобразуется в механическую энергию непрерывного вращения ротора.
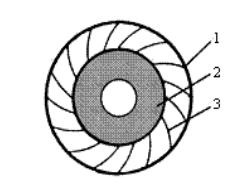
Рис. 7. Схема вращающегося пьезодвигателя с продольно-изгибными колебаниями пьезоэлемента.
Другой популярной конструкцией является двигатель с радиальными колебаниями (рис. 8). Внутри цилиндрического ротора 1 расположен кольцевой пьезоэлемент-статор 2. По его внешней поверхности закреплены упругие толкатели 3. При подаче переменного напряжения статор начинает радиально «дышать» — его диаметр циклически увеличивается и уменьшается. В фазе расширения толкатели проталкивают ротор на небольшой угол. В фазе сжатия они проскальзывают по внутренней поверхности ротора, который продолжает движение по инерции. Сумма этих микротолчков приводит к плавному вращению.
Рис. 8. Схема вращающегося пьезодвигателя с радиальными колебаниями пьезоэлемента.
Линейные пьезодвигатели
Линейные пьезодвигатели работают по схожим принципам, но обеспечивают возвратно-поступательное движение. В конструкции, показанной на рис. 9, а, неподвижный пьезоэлемент 1 прижимается к подвижному позиционеру 3. Сложные колебания вибратора заставляют его «шагать» по поверхности позиционера, перемещая его влево или вправо в зависимости от фазы колебаний.
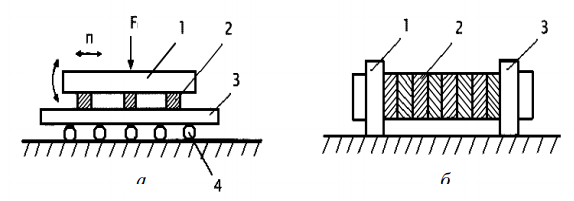
Рис. 9. Схемы линейных пьезодвигателей: а – с продольно-изгибными колебаниями; б – с управляемой деформацией (шаговый).
Для задач сверхточного позиционирования применяются двигатели с управляемой деформацией (рис. 9, б), часто называемые «дюймовыми червями» (inchworm). Пьезопреобразователь 2 в виде стержня расположен между двумя зажимами 1 и 3. Цикл движения выглядит так: зажим 1 фиксируется, на пьезоэлемент подается напряжение, он удлиняется, перемещая зажим 3. Затем зажим 3 фиксируется, зажим 1 освобождается, напряжение снимается, и пьезоэлемент сжимается, подтягивая зажим 1. Повторяя этот цикл, двигатель совершает шаговое перемещение на большие расстояния с нанометровым разрешением.
На рисунке 10 показана конструкция мощного линейного пьезодвигателя на основе пакетного преобразователя, способного развивать усилия до 200 Н и перемещать объекты массой в десятки килограмм на расстояние до 50 мкм.
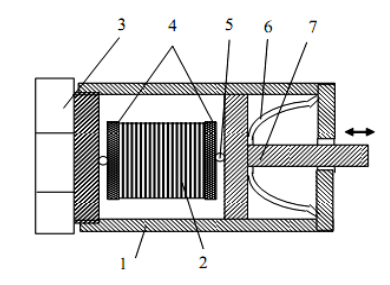
Рис. 10. Пакетный пьезодвигатель: Пьезопакет 2, сжатый пружиной 6 через винт 3, толкает шток 7.
Современные прецизионные пьезодвигатели для обеспечения высокой точности и компенсации гистерезиса оснащаются встроенными датчиками перемещения, которые организуют замкнутую систему управления с обратной связью по положению (рис. 11).

Рис. 11. Пьезодвигатель со встроенным индуктивным датчиком микроперемещений.
Применение пьезотехнологий: от макромира до наноуровня
Нанопозиционирование и микроскопия
С развитием нанотехнологий пьезодвигатели стали незаменимым инструментом в системах сверхточного позиционирования. Ярчайший пример — зондовые микроскопы (сканирующий туннельный микроскоп — СТМ, атомно-силовой микроскоп — АСМ), позволяющие визуализировать и манипулировать объектами на атомарном уровне. В СТМ (рис. 12) три ортогональных пьезодвигателя (3) с высочайшей точностью перемещают острие зонда (1) над поверхностью образца (2), сканируя его рельеф с разрешением до отдельных атомов.
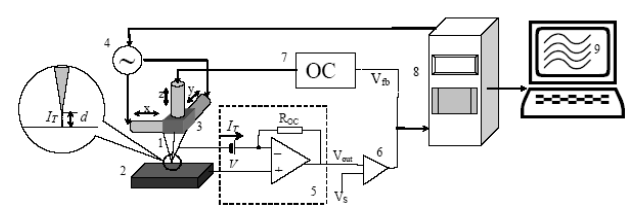
Рис. 12. Схема сканирующего туннельного микроскопа: 1 – зонд; 2 – образец; 3 – пьезоэлектрические двигатели x, y, z; 4 – генератор развертки; 5 – сенсор туннельного тока; 6 – компаратор; 7 – цепь обратной связи; 8 – компьютер; 9 – результирующее изображение z(x,y).
Автомобильная промышленность
Пьезоприводы произвели революцию в системах впрыска топлива для дизельных и бензиновых двигателей. Пьезокерамические форсунки (рис. 13) срабатывают в 5-10 раз быстрее традиционных электромагнитных. Это позволяет осуществлять несколько сверхточных впрысков топлива за один такт, оптимизируя процесс сгорания. Результат — повышение КПД двигателя, снижение расхода топлива и значительное уменьшение выбросов вредных веществ в атмосферу (соответствие строгим экологическим стандартам Euro 6/7).

Рис. 13. Пьезофорсунка для впрыска бензина: подача напряжения вызывает расширение пьезокерамического столба, который мгновенно приподнимает дозирующую иглу.
Адаптивная оптика и астрономия
В современных гигантских телескопах используются многосегментные адаптивные зеркала (рис. 14). Под каждым сегментом такого зеркала установлены пьезоприводы, которые в реальном времени с частотой в сотни герц изменяют его форму и наклон. Это позволяет компенсировать искажения, вносимые турбулентностью земной атмосферы, и получать изображения звезд с четкостью, сравнимой с космическими телескопами.
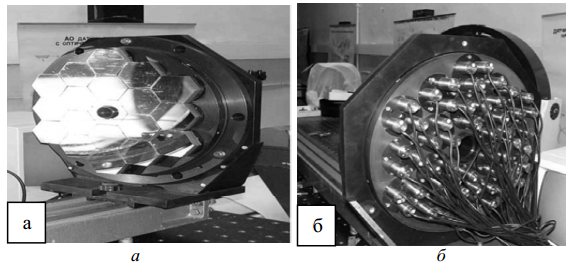
Рис. 14. Многосегментное адаптивное зеркало телескопа (а) и система управления им на базе пьезоприводов (б).
Пьезоизлучатели: от звука до ультразвука
Пьезокерамические преобразователи, работающие как излучатели, генерируют акустические волны в широком диапазоне частот.
- Звуковые излучатели: Широко применяются в бытовой технике, телефонах, системах сигнализации, игрушках для генерации звуковых сигналов.
- Ультразвуковые излучатели: Нашли огромное применение в промышленности и медицине. В промышленности мощный ультразвук используется для очистки деталей, сварки пластмасс, диспергирования и гомогенизации сред (рис. 15), а также распыления жидкостей. В быту это ультразвуковые стиральные машины и отпугиватели грызунов.

Рис. 15. Ультразвуковые колебательные системы на основе пьезокерамических преобразователей для воздействия на жидкие среды.
Применение в медицине
Ультразвуковые пьезоизлучатели являются основой для:
- Диагностики (УЗИ): Пьезодатчик излучает короткий ультразвуковой импульс и затем переключается в режим приема, регистрируя эхо-сигналы, отраженные от внутренних органов.
- Терапии: Ультразвук используется для локального прогрева тканей, ускорения заживления, введения лекарственных препаратов (фонофорез) (рис. 16).
- Хирургии: Сфокусированный ультразвук высокой интенсивности (HIFU) позволяет разрушать опухоли глубоко в тканях без разрезов. Ультразвуковые скальпели обеспечивают точное рассечение тканей с одновременной коагуляцией сосудов.
- Стоматологии: Ультразвуковые скейлеры эффективно удаляют зубной камень.

Рис. 16. Рабочие наконечники блока ультразвуковой терапии.
Интересные факты о пьезоэлектричестве
- Пьезоэффект в природе: Пьезоэлектрическими свойствами обладают многие биологические структуры, включая костную ткань, коллаген и даже молекулы ДНК. Считается, что этот эффект играет роль в процессах регенерации костей.
- Первое военное применение: В годы Первой мировой войны французский физик Поль Ланжевен разработал первый в мире гидролокатор (сонар) на основе пьезоэлектрических преобразователей из кварца для обнаружения подводных лодок.
- Энергия из шагов: Ведутся активные разработки по созданию «пьезоэлектрических полов» для оживленных мест (вокзалы, стадионы). Энергия, генерируемая давлением от шагов тысяч людей, может использоваться для освещения или питания информационных табло.
- Вечная зажигалка: В обычных пьезозажигалках нет батареек. При нажатии на кнопку молоточек с силой ударяет по небольшому пьезокристаллу, который генерирует высоковольтную искру, воспламеняющую газ.
FAQ: Часто задаваемые вопросы о пьезоэлектричестве
- В чем разница между пьезоэлектриками и сегнетоэлектриками?
- Любой сегнетоэлектрик является пьезоэлектриком, но не наоборот. Сегнетоэлектрики — это подкласс пьезоэлектриков, обладающих спонтанной поляризацией, которую можно переориентировать внешним полем. Кварц является пьезоэлектриком, но не сегнетоэлектриком, так как у него нет спонтанной поляризации.
- Что такое точка Кюри для пьезокерамики?
- Это критическая температура, выше которой материал теряет свои сегнетоэлектрические и, следовательно, пьезоэлектрические свойства. Происходит фазовый переход в более симметричную кристаллическую структуру, и материал необратимо деполяризуется. Эксплуатация пьезоэлементов выше точки Кюри недопустима.
- Что такое гистерезис пьезоактуатора и как с ним бороться?
- Гистерезис — это неоднозначность зависимости перемещения от напряжения. То есть, траектория перемещения при увеличении напряжения не совпадает с траекторией при его уменьшении. Это приводит к погрешности позиционирования. Для борьбы с гистерезисом в прецизионных системах используют либо сложные алгоритмы управления, либо, что более эффективно, системы с замкнутым контуром, где датчик обратной связи (например, тензодатчик или емкостной сенсор) постоянно измеряет реальное положение и корректирует управляющее напряжение.
- Могут ли пьезоэлементы использоваться для генерации значительной электроэнергии?
- В настоящее время — нет. Пьезоэлементы очень эффективны для преобразования энергии, но количество энергии, которое можно «собрать» от одного элемента, невелико. Они идеально подходят для питания маломощной электроники (датчики, микросхемы) в системах сбора энергии (energy harvesting), но не для генерации энергии в промышленных масштабах.
- Насколько долговечны пьезокерамические устройства?
- При правильной эксплуатации (в пределах допустимых электрических и механических нагрузок) пьезокерамические актуаторы могут совершать миллиарды циклов срабатывания без существенной деградации свойств. Они являются твердотельными устройствами без трущихся частей, что обеспечивает им очень долгий срок службы.
- Какие основные меры предосторожности при работе с пьезоактуаторами?
- Во-первых, пьезокерамика — хрупкий материал, его следует оберегать от ударов и изгибающих нагрузок (если это не биморф). Во-вторых, многие актуаторы работают при высоких напряжениях (сотни вольт), что требует соблюдения электробезопасности. В-третьих, нельзя прикладывать к ним напряжение, превышающее допустимое, и эксплуатировать при температурах выше точки Кюри.
Заключение
От скромного лабораторного открытия братьев Кюри до ключевой технологии XXI века — пьезоэлектричество прошло огромный путь. Уникальная способность пьезоматериалов напрямую связывать механический и электрический миры открыла невероятные возможности в самых разных областях человеческой деятельности. Современная пьезокерамика и преобразователи на её основе позволяют создавать устройства с беспрецедентной точностью, скоростью и мощностью в миниатюрном исполнении. По мере развития материаловедения, в частности, создания новых бессвинцовых и более эффективных пьезокомпозитов, а также совершенствования нанотехнологий, можно с уверенностью сказать, что роль пьезоэлектричества в нашем технологическом будущем будет только возрастать.
Регулярно публикую материалы о передовых методах обработки и сварки материалов, а также освещаю новинки в сфере производства,материаловедения, строительства и др.