Содержание страницы
В мире передовых материалов одно из самых захватывающих направлений — это разработка электроактивных полимеров (ЭАП). Эти уникальные соединения, часто называемые «искусственными мышцами», открывают новые горизонты в робототехнике, медицине и аэрокосмической отрасли. Суть их феномена заключается в способности изменять свою форму и размеры под воздействием электрического поля. При этом, подобно биологическим мускулам, они способны развивать значительные деформации и усилия, что делает их идеальными кандидатами для создания приводов и исполнительных механизмов нового поколения.
Хотя сам принцип электрострикции в материалах был известен давно, настоящий прорыв в области гибких и эффективных ЭАП произошел в конце 1990-х годов. Исследования, проведенные в SRI International, продемонстрировали огромный потенциал диэлектрических эластомеров, показав их способность к деформации более чем на 100%, что и послужило толчком к активному развитию этой технологии по всему миру.
Принцип действия диэлектрических ЭАП: Умный конденсатор в движении
Наиболее распространенный и изученный тип ЭАП — это диэлектрические эластомеры. По своей сути, их устройство гениально в своей простоте. Представьте себе гибкий конденсатор: тончайшая полимерная диэлектрическая пленка размещается между двумя эластичными и токопроводящими электродами. В исходном, неактивном состоянии, эта структура находится в покое.
Магия начинается при подаче электрического напряжения на электроды. На их поверхностях накапливаются противоположные заряды (положительные и отрицательные), что порождает мощные силы электростатического притяжения — так называемое давление Максвелла. Эти силы сжимают диэлектрическую пленку по толщине, как будто её сдавливает невидимый пресс. Поскольку полимер является практически несжимаемым материалом, уменьшение толщины неминуемо компенсируется увеличением его площади. Пленка мгновенно расширяется в стороны, перпендикулярно направлению электрического поля. Этот процесс наглядно иллюстрирует рисунок 1.
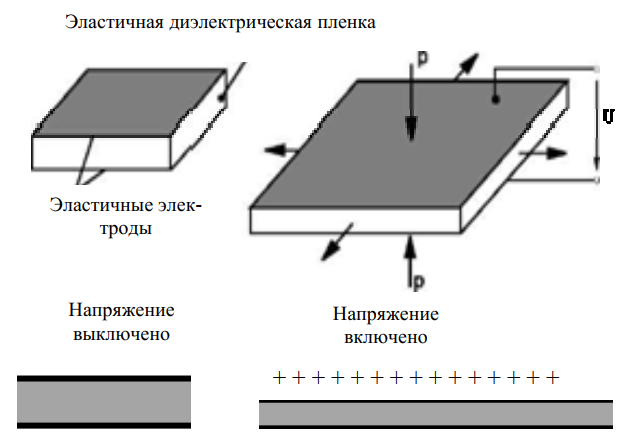
Рис. 1. Схематическое изображение принципа работы диэлектрического электроактивного полимера (ЭАП). При подаче напряжения электроды притягиваются, сжимая полимер по толщине и вызывая его расширение в плоскости.
Материалы и конструкция: Основа эффективности
Для создания высокоэффективных ЭАП требуются материалы с особым набором свойств. В качестве диэлектрического слоя, как правило, применяют пленки толщиной от 30 до 60 мкм, изготовленные из высокоэластичных полимеров. Наибольшее распространение получили акриловые эластомеры (например, VHB-ленты) и силиконовые компаунды, отличающиеся высокой диэлектрической проницаемостью и механической прочностью.
Качество и свойства исходных материалов строго регламентируются. Например, упруго-прочностные характеристики резин и эластомеров, включая силиконовые, определяются методами, стандартизированными в ГОСТ 270-75 «Резина. Метод определения упруго-прочностных свойств при растяжении». Этот стандарт обеспечивает единство измерений и гарантирует, что материал выдержит требуемые нагрузки и деформации.
Не менее важен и материал электродов. Они должны быть не только токопроводящими, но и столь же эластичными, как и сама полимерная пленка, чтобы не мешать ее деформации. Чаще всего электроды выполняют в виде тонких слоев проводящих частиц (например, технического углерода или сажи), взвешенных в гибкой полимерной матрице, которая наносится на диэлектрик.
Физика процесса: Формула давления
Давление (p), которое вызывает сжатие полимерной пленки под действием электрического поля, можно рассчитать по следующей формуле:
p = ε · ε0 · (U / d)2
где:
- ε – относительная диэлектрическая проницаемость полимера (безразмерная величина);
- ε0 – диэлектрическая постоянная вакуума (приблизительно 8.85 × 10-12 Ф/м);
- U – приложенное электрическое напряжение (в Вольтах);
- d – толщина полимерной пленки (в метрах).
Анализ этой формулы показывает ключевые зависимости: генерируемое давление прямо пропорционально квадрату напряжения и обратно пропорционально квадрату толщины пленки. Это объясняет, почему для активации таких устройств требуются довольно высокие напряжения — сотни, а иногда и тысячи вольт, особенно для относительно толстых пленок.
Области применения: от роботов до адаптивных крыльев
Благодаря своей уникальной способности преобразовывать электрическую энергию в механическое движение, диэлектрические ЭАП находят все более широкое применение. Их используют для создания легких, бесшумных и эффективных линейных приводов для исполнительных механизмов.
Валковые приводы для линейного и изгибного движения
Одним из ярких примеров является валковый привод, показанный на рисунке 2. Он представляет собой сжатую спиральную пружину, вокруг которой обернут слой ЭАП-пленки. При подаче напряжения пленка расширяется, позволяя пружине распрямиться и совершить линейное поступательное движение. Такие приводы незаменимы там, где важны малый вес и простота конструкции: в механизмах роботов, современных протезах, миниатюрных клапанах и насосах. Для увеличения мощности несколько таких приводов можно объединять в параллельные или последовательные сборки.
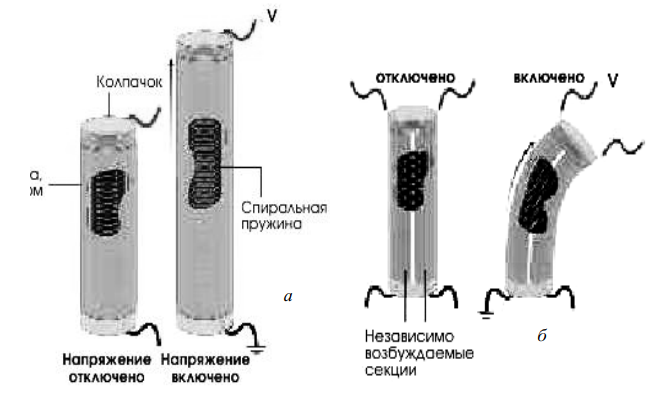
Рис. 2. Примеры валковых приводов на основе ЭАП: а) привод для создания прямолинейного движения; б) привод, обеспечивающий управляемое изгибное движение за счет сегментированных электродов.
Небольшая модификация конструкции позволяет достичь еще более сложных движений. Если нанести на пленку электроды специальной формы, разделив их на независимые сегменты (рис. 2, б), валик превращается в два и более независимо управляемых привода. Подавая напряжение только на левую сторону, можно заставить валик изогнуться вправо. Активация всех сегментов приведет к его удлинению. Такая технология открывает путь к созданию гибких манипуляторов для роботов, управляемых катетеров и эндоскопов для малоинвазивной хирургии, а также шагающих механизмов.
Мягкие захваты (схваты) для деликатных объектов
На рисунке 3 показан принцип работы роботизированного схвата на основе ЭАП. Пластины из этого материала могут изгибаться, позволяя деликатно захватывать и удерживать объекты хрупкой или сложной формы, не повреждая их.
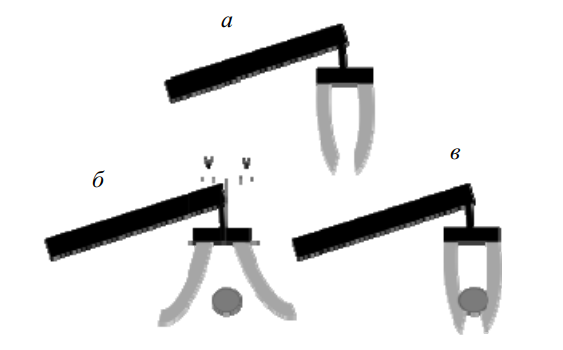
Рис. 3. Последовательность работы ЭАП-схвата: а) исходное состояние; б) при подаче напряжения пластины расходятся, и схват подводится к объекту; в) после снятия напряжения ЭАП-пластины возвращаются в исходную форму, надежно удерживая объект.
Адаптивные поверхности и новые горизонты
Одним из самых перспективных направлений является использование ЭАП для создания поверхностей с управляемым рельефом. Например, изменяя микрорельеф поверхности крыла самолета или корпуса корабля в реальном времени, можно оптимизировать аэро- и гидродинамические характеристики, снижая сопротивление и экономя топливо. В большинстве случаев деформация ЭАП происходит в плоскости, а изменение толщины незначительно. Однако эту проблему можно решить, комбинируя тонкие ЭАП-пленки с более толстыми слоями инертного полимерного геля. В такой системе расширение пленки будет выдавливать гель, создавая на поверхности управляемые выступы и впадины.
Заключение: Перспективы технологии «искусственных мышц»
Электроактивные полимеры перестали быть лишь лабораторной диковинкой и уверенно движутся в сторону коммерческого применения. Их уникальные свойства — высокая эластичность, бесшумная работа, малый вес и высокая плотность энергии — делают их незаменимыми для следующего поколения робототехники, медицинского оборудования и адаптивных систем. Хотя перед инженерами все еще стоят задачи по снижению рабочего напряжения и повышению долговечности материалов, нет сомнений, что технология «искусственных мышц» в ближайшем будущем кардинально изменит наш взгляд на то, как машины могут двигаться и взаимодействовать с окружающим миром.
Регулярно публикую материалы о передовых методах обработки и сварки материалов, а также освещаю новинки в сфере производства,материаловедения, строительства и др.