В современной машиностроительной практике при проектировании и анализе машин и механизмов особое внимание уделяется процессу передачи механической энергии от одного элемента конструкции к другому. Для этого взаимодействующие детали и сборочные единицы рассматривают в виде пар, которые называются кинематическими парами. Эти пары обеспечивают относительное движение звеньев и являются фундаментальным понятием кинематики машин.
Кинематические пары — это подвижные соединения двух соприкасающихся звеньев, обеспечивающие передачу движения и сил. От формы и характера соприкасающихся поверхностей зависит тип движения, который может быть вращательным, поступательным или комбинированным. Важнейшим аспектом является различение ведущего и ведомого звеньев, что позволяет понять направления и характер передачи энергии в системе.
Дальнейшее объединение таких пар образует кинематические цепи, а цепи с четко заданными движениями ведомых звеньев формируют механизмы, широко применяемые в разнообразных машинах. Для облегчения проектирования и анализа используют специальные условные обозначения кинематических пар, что позволяет наглядно представлять сложные взаимодействия на кинематических схемах.
История изучения кинематики и механических передач берет начало в древности, когда первые простейшие механизмы применялись в строительстве и сельском хозяйстве. Одним из первых важных достижений была разработка простых машин — рычагов, блоков и клиньев, позволивших значительно облегчить физический труд.
В эпоху античности ученые, такие как Архимед, заложили основы механики и изучения движения. С изобретением зубчатых передач и шестеренок в средневековье началась новая эра развития машинного дела.
В XIX веке с развитием промышленной революции произошёл качественный скачок в механике — появились сложные передачи, кинематические цепи и механизмы, которые нашли широкое применение в станках, паровых двигателях и транспортных средствах.
Современное понимание кинематических пар и цепей сформировалось благодаря трудам выдающихся механиков и инженеров, таких как Жозеф Мари Жаккар, Чарльз Парсонс и других, которые систематизировали знания о передачах движения и сил в машинах.
Для анализа передачи механической энергии внутри технических устройств принято рассматривать взаимодействие элементов в виде парных соединений между деталями и узлами. Такой подход позволяет с высокой точностью исследовать характер и направление передаваемых движений в механизмах различной сложности.
Под кинематической парой понимают соединение двух звеньев, находящихся в контакте и обладающих возможностью относительного перемещения. Конструктивные особенности такой пары определяются геометрией соприкасающихся поверхностей этих звеньев. Если между соединяемыми звеньями исключено относительное движение, то такая пара называется неподвижным соединением. Стоит отметить, что сами звенья могут быть как монолитными деталями, так и сборками из нескольких жестко скрепленных между собой компонентов.
Каждое звено в кинематической паре выполняет определенную функцию. Звено, инициирующее движение, называется ведущим, а принимающее или исполняющее — ведомым. В ряде случаев ведомое звено также именуется рабочим, если именно оно реализует требуемое полезное действие в механизме.
Объединение звеньев, соединенных подвижным образом через различные кинематические пары, формирует конструкцию, называемую кинематической цепью. Если такая цепь организована таким образом, чтобы на выходе обеспечивать строго определенные виды и параметры движения, то она становится механизмом.
Графическое представление подобных цепей в машиностроительной практике реализуется через кинематические схемы, в которых используется стандартизированная система условных обозначений, как это видно в таблице 1. Такие схемы строятся на основе использования символов, характеризующих вид каждой пары и способ соединения звеньев, что позволяет быстро интерпретировать структуру передачи движения.
Кинематическая схема, составленная из символов, иллюстрирует взаимосвязь всех элементов конструкции, начиная от источника механической энергии и заканчивая исполнительными звеньями. Примером служит схема, приведенная на рис. 1.
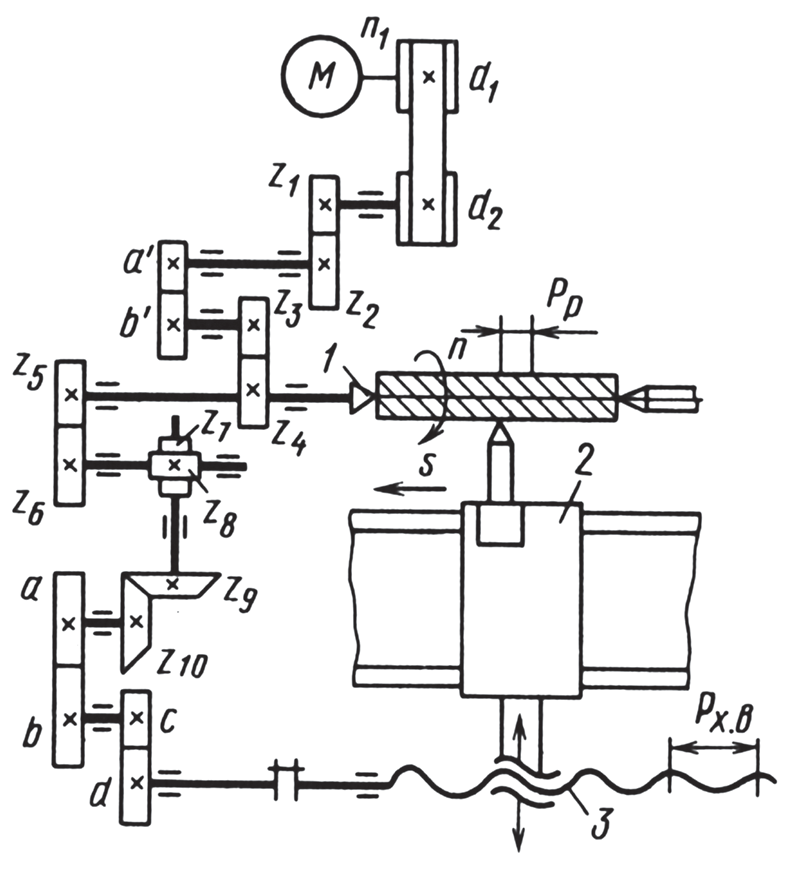
Рис. 1. Упрощённая схема кинематической структуры токарно-винторезного станка
На представленной схеме изображен процесс нарезания резьбы на станке токарно-винторезного типа. Основное вращательное движение, передаваемое шпинделю с установленной заготовкой (поз. 1), обеспечивается за счёт работы электродвигателя (М). Это движение через систему ремён (шкивы d1, d2), пары зубчатых колес z1 и z2, а также сменные зубчатые шестерни а’ и б’ передается на последующие колеса z3 и z4.
Подача, обеспечивающая продольное перемещение резца относительно заготовки, реализуется путем трансформации вращения шпинделя через дополнительный ряд зубчатых соединений: пары z5 и z6, винтовые конические колеса z7–z8 и z9–z10, далее — сменные шестерни а и в, с и d, и, наконец, вращение поступает на ходовой винт (поз. 3). Поступательное перемещение суппорта (поз. 2), на котором установлен резец, является результатом преобразования вращения ходового винта в линейное движение.
Приведённая ниже таблица представляет собой обобщённое отображение условных графических обозначений, применяемых при построении кинематических схем механических передач:
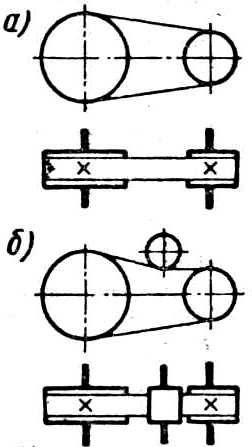
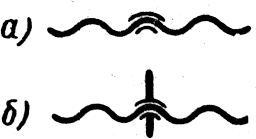
| Ремённая передача плоского типа: а — прямая схема; б — прямая с натяжным роликом |
 |
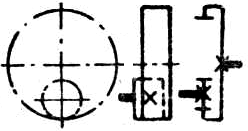
Коническое зубчатое зацепление между валами, оси которых пересекаются (тип зубьев не уточняется) | 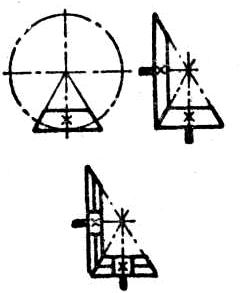 |
| Клиновидная ремённая передача | 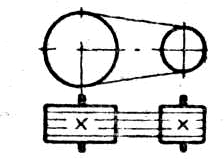 |
Реечная передача (тип зубьев не указан) |  |
| Цепные передачи: а — общая схема; б — роликовая; в — бесшумная |
 |
Червячная передача с цилиндрическим червяком |  |
| Цилиндрическая зубчатая передача между параллельными валами: а — внешнее зацепление |
 |
Винтовое зубчатое зацепление | 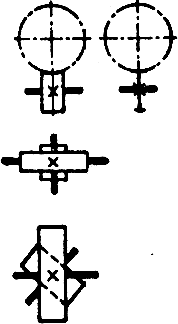 |
| Та же передача: б — с прямыми и винтовыми зубьями |
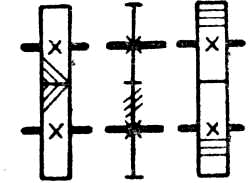 |
Винт-гайка с элементом скольжения: а — неразъемный тип; б — разъемный |
 |
| Тот же тип передачи: в — внутренняя передача |
 |
Механизм с храповым зацеплением |  |
Интересные факты:
-
Кинематические пары, несмотря на кажущуюся простоту, могут иметь весьма сложную конструкцию и разнообразные виды движения — от вращения до качания и поступательного перемещения.
-
В мире существует более десятка основных типов кинематических пар, и каждая из них находит своё применение в конкретных механизмах — от простых часов до сложных промышленных станков.
-
Первая зубчатая передача была найдена археологами на древнегреческом механизме Антикитерского устройства — древнем аналоговом компьютере, датируемом около 100 г. до н.э.
-
Условные обозначения кинематических пар позволяют инженерам всего мира быстро и однозначно понимать устройство механизмов, облегчая коммуникацию и разработку проектов.
-
Токарно-винторезный станок — классический пример машины, использующей различные виды кинематических передач для преобразования вращательного движения в поступательное с высокой точностью.
Понимание и грамотное использование кинематических пар и цепей является основой конструирования современных машин и механизмов. Эти понятия позволяют эффективно передавать механическую энергию, обеспечивая точность и надежность работы оборудования.
Таким образом, кинематические пары и цепи представляют собой фундаментальный раздел машиностроения, необходимый для создания эффективных и долговечных машин. Знания об их устройстве и характеристиках позволяют инженерам разрабатывать инновационные решения, способствующие развитию промышленности и техники.
Регулярно публикую материалы о передовых методах обработки и сварки материалов, а также освещаю новинки в сфере производства,материаловедения, строительства и др.