Содержание страницы
- 1. Бесщеточные двигатели постоянного тока (BLDC)
- 2. Конструкция бесщеточных двигателей постоянного тока (BLDC)
- 3. Система привода бесщеточного постоянного тока (BLDC)
- 4. Датчики положения
- 5. Особенности и преимущества BLDC-двигателей
- 6. Конфигурации роторов с постоянными магнитами
- 7. Типы бесщёточных BLDC-двигателей
- 8. Бесщеточный двигатель с прямоугольной волной
- 9. Характеристика момента/скорости BLDC двигателя
- 10. Применение BLDC моторов
- 11. Заключение
Бесщеточный двигатель постоянного тока (BLDC — Brushless Direct Current Motor) — это электрический двигатель, работающий без использования механических щеток и коллектора. Вместо этого управление токами в обмотках осуществляется с помощью инвертора и датчиков положения ротора. Это делает BLDC-двигатели высокоэффективными, надежными и практически необслуживаемыми.
Развитие материалов с постоянными магнитами, обладающими высокой магнитной энергией, привело к созданию машин постоянного тока с возбуждением на основе постоянных магнитов. Бесщеточный двигатель постоянного тока (BLDC) представляет собой двигатель с неподвижной частью, аналогичной синхронному двигателю, и постоянными магнитами в роторе. Он работает в режиме самоуправления с использованием датчиков положения для определения полюсов ротора и инвертора для управления фазными токами обмотки статора.
Обычный двигатель постоянного тока имеет стационарную систему возбуждения, состоящую из полюсов магнитов, которые создают магнитное поле в машине. Якорь является вращающейся частью и установлен на валу. Конструкция BLDC-двигателя схожа с конструкцией переменного двигателя, известного как синхронный двигатель с постоянными магнитами (PMSM).
Бесщеточные двигатели постоянного тока имеют множество преимуществ по сравнению с традиционными двигателями постоянного тока. У BLDC-двигателей небольшой ротор, высокая удельная мощность, низкий момент инерции, более высокий КПД и минимальные требования к обслуживанию. Благодаря отсутствию коллектора и щеток они обладают высокой скоростью и крутящим моментом.
В настоящее время BLDC-двигатели являются важным элементом современной приводной технологии. Они используются в широком спектре приложений, включая электромобили, гибридные автомобили, робототехнику, приводы жестких дисков, сервоприводы, DVD-плееры, вентиляторы, стиральные машины, насосы, воздуходувки, компрессоры, промышленных роботов и станков с ЧПУ и т.д.
1. Бесщеточные двигатели постоянного тока (BLDC)
Бесщеточный двигатель постоянного тока (BLDC) представляет собой электрический двигатель, в котором статор по конструкции схож с синхронным двигателем, а на роторе установлены постоянные магниты. Такой двигатель работает в режиме самоуправления благодаря использованию датчиков положения для определения полюсов ротора и инвертора для управления фазными токами обмоток статора.
В традиционных двигателях постоянного тока используются коллектор и щетки, которые подвержены износу и требуют регулярного обслуживания. В BLDC-двигателях функции коллектора и щеток реализуются с помощью силовых ключей и цифровых контроллеров, что позволяет создавать практически необслуживаемые двигатели.
Датчики положения ротора и силовые ключи в инверторе выполняют функции коллектора и щеток, заменяя механические компоненты, используемые в традиционных двигателях постоянного тока.
2. Конструкция бесщеточных двигателей постоянного тока (BLDC)
Конструкция BLDC-двигателя представлена на рисунке 1. BLDC-двигатель состоит из двух основных частей:
- Статор — неподвижная часть, которая включает сердечник статора и распределенные трехфазные обмотки переменного тока. Обмотки по своей конструкции аналогичны обмоткам синхронного двигателя.
- Ротор — вращающаяся часть, на которой установлены постоянные магниты для создания магнитных полюсов, заменяющие обмотки возбуждения.
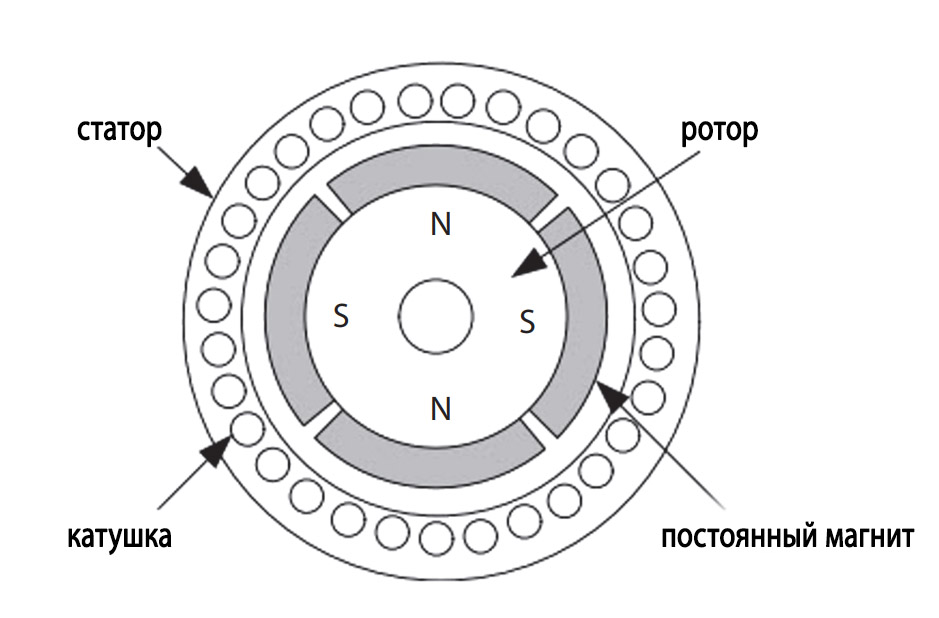
Рисунок 1. Конструкция BLDC-двигателя
Конструкция современного BLDC-двигателя схожа с конструкцией двигателя, называемого синхронным двигателем с постоянными магнитами (PMSM). Основное различие заключается в роторе: вместо обмоток возбуждения на роторе установлены постоянные магниты, которые создают вращающееся магнитное поле.
Поскольку для возбуждения полюсов ротора не требуется подача постоянного тока, эти двигатели просты в конструкции, надежны, устойчивы к износу и имеют низкую стоимость.
Двигатели PMSM обладают высокой надежностью, отсутствием щеток, высокой механической прочностью и быстрым откликом по сравнению с традиционными двигателями. Они обеспечивают:
- Равномерный (без рывков) крутящий момент.
- Низкий уровень шума.
- Приспособлены для работы на высоких скоростях.
3. Система привода бесщеточного постоянного тока (BLDC)
Основные части системы привода BLDC показаны на схематическом блочной диаграмме на рисунке 2. Приводной двигатель состоит из трех элементов: статора, ротора с системой возбуждения в виде постоянного магнита и системы бесконтактного определения положения ротора (датчика положения ротора).
Для трехфазного двигателя, управляемого от 6-шагового преобразователя мощности, последовательность операций системы следующая:
Устройство управления получает информацию о положении ротора от датчиков положения. Эта информация затем преобразуется в одно из шести состояний тока, как показано на рисунке 4. Каждый импульс тока вызывает появление ЭДС в статоре, которая остается фиксированной в пространстве в течение 60° до следующего состояния тока. После того как ротор завершает 60° поворота, фаза тока переключается мгновенно в следующее состояние. Это приводит к шаговому изменению ЭДС в обмотке якоря на 60° в направлении вращения. Этот процесс повторяется шесть раз за один электрический оборот, что приводит к дискретной вращающийся ЭДС и непрерывному вращению.
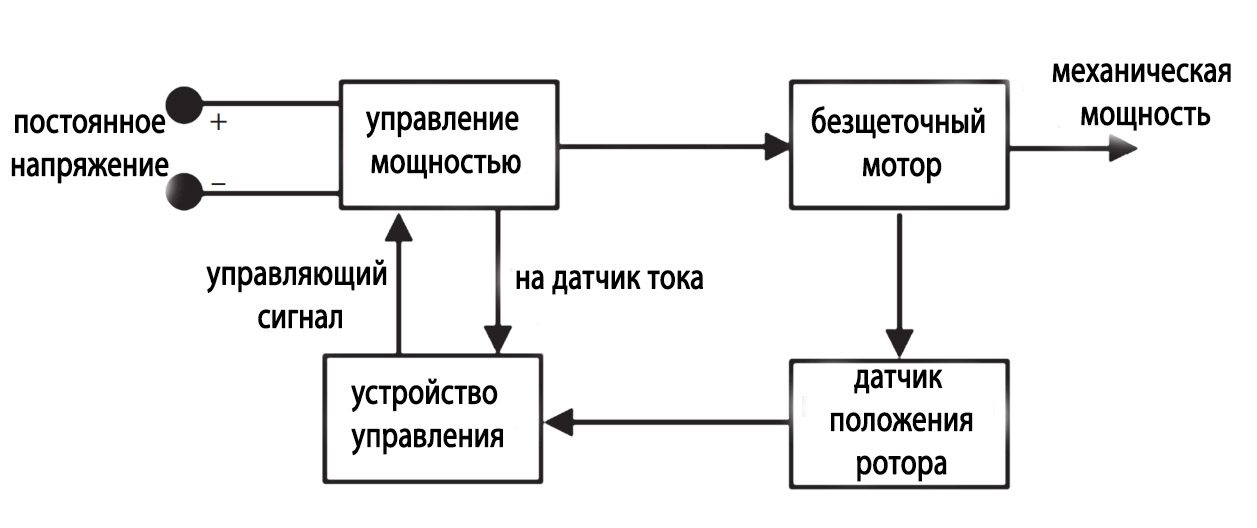
Рисунок 2. Схематическая блок-схема системы привода бесщеточного двигателя постоянного тока.
Бесщёточный BLDC-двигатель работает аналогично саморегулируемому синхронному двигателю. Полупроводниковые силовые ключи в составе инвертора, которые управляют током двигателя, коммутируются обратной ЭДС двигателя.
В настоящее время используются инверторы, состоящие из полупроводниковых силовых ключей, таких как IGBT или MOSFET. Переключения этих ключей управляются сигналами на затвор, которые передаются от датчиков положения ротора.
На рисунке 3 представлена конфигурация инвертора, питающегося от источника постоянного тока и используемого в системе привода BLDC. Моменты включения и выключения силовых ключей регулируются датчиками положения ротора таким образом, чтобы угол между полем ротора и статора поддерживался на уровне 90°.
Волновые формы фазных токов статора показаны на рисунке 4. Каждые 60° поворота ротора ключи инвертора переключаются. Силовые ключи пронумерованы в порядке последовательности их включения. Если инвертор питается от источника постоянного напряжения, управление током двигателя осуществляется с использованием ШИМ (широтно-импульсной модуляции).
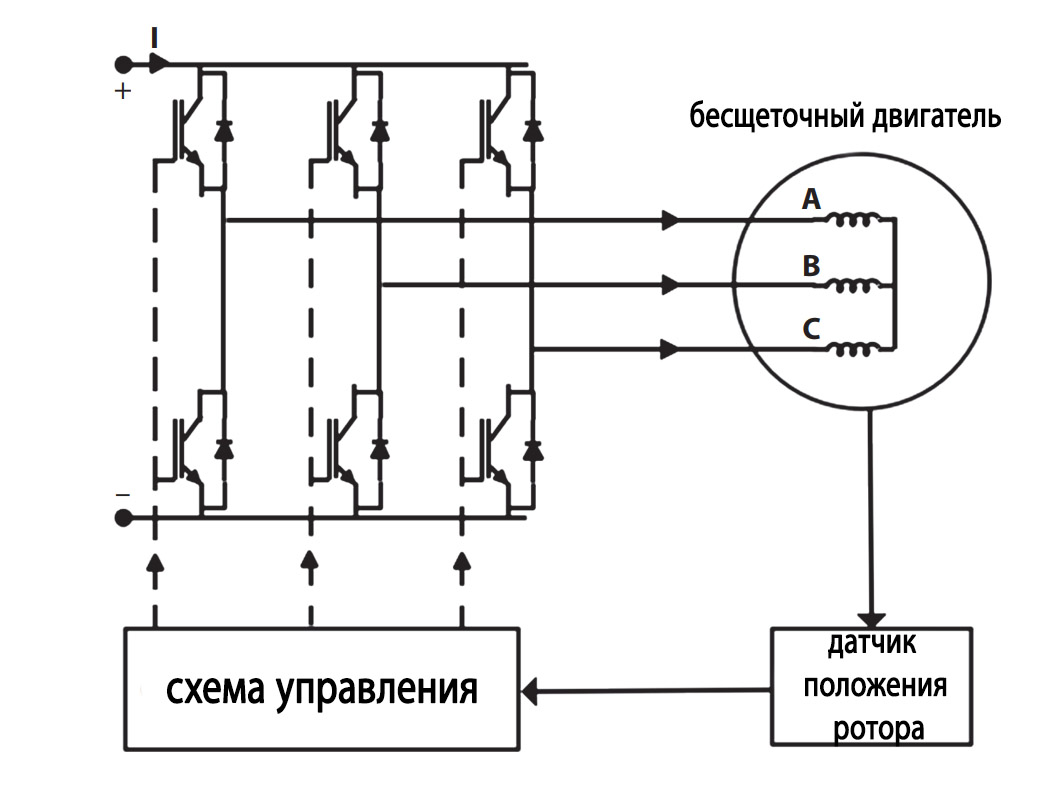
Рисунок 3. Система привода бесщеточного двигателя постоянного тока.
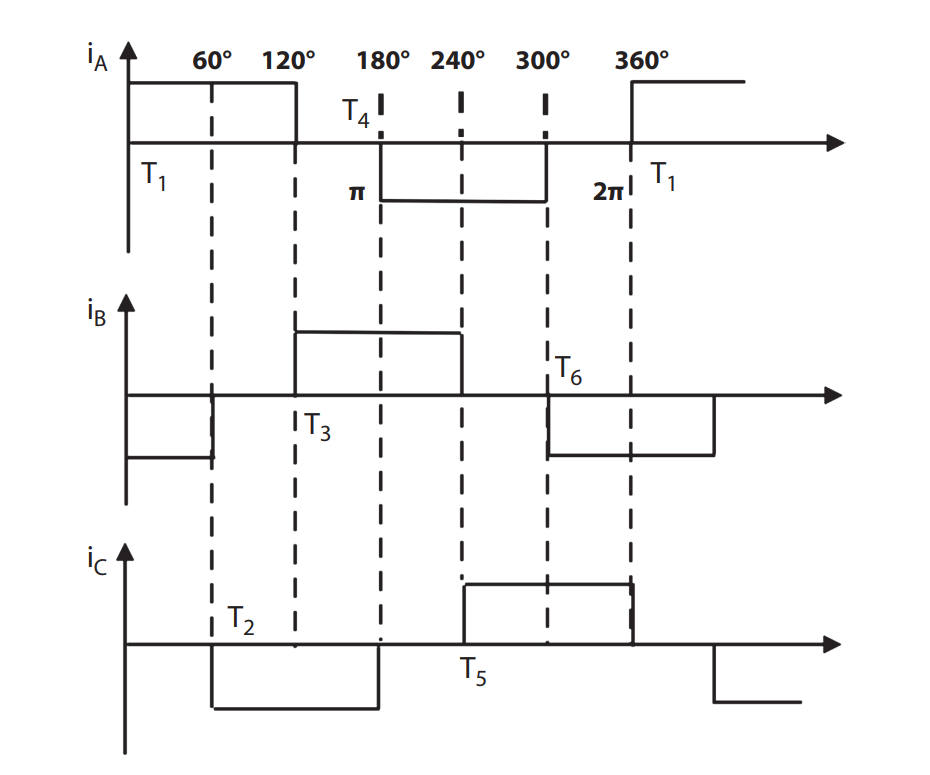
Рисунок 4. Фазные токи статора.
4. Датчики положения
Датчики положения используются для определения положения полюсов ротора и отправки логических кодов на декодер коммутации. После обработки этого кода цепи запуска силовых ключей активируются, подавая питание на обмотки статора двигателя. Взаимодействие между постоянными магнитами ротора и токами, протекающими через обмотки статора, создает однонаправленный крутящий момент.
Бесщёточные BLDC-двигатели оснащаются датчиками положения ротора. В настоящее время применяются следующие типы датчиков положения:
- Оптические датчики
- Датчики Холла или датчики магнитного поля
В случае оптических датчиков световой источник освещает дисковый шаблон, прикрепленный к валу ротора, и фотодиод фиксирует присутствие или отсутствие света. Световой источник и фотодиод остаются неподвижными. Основным преимуществом этих датчиков является то, что сигнал от фотодиода изменяется достаточно резко, обеспечивая точное определение точек переключения. Также выходной сигнал является постоянным током (DC), поэтому не требует обработки.
Недостатки оптических датчиков:
- Высокая стоимость.
- Требуется чистая рабочая среда.
- Источник света может внезапно выйти из строя.
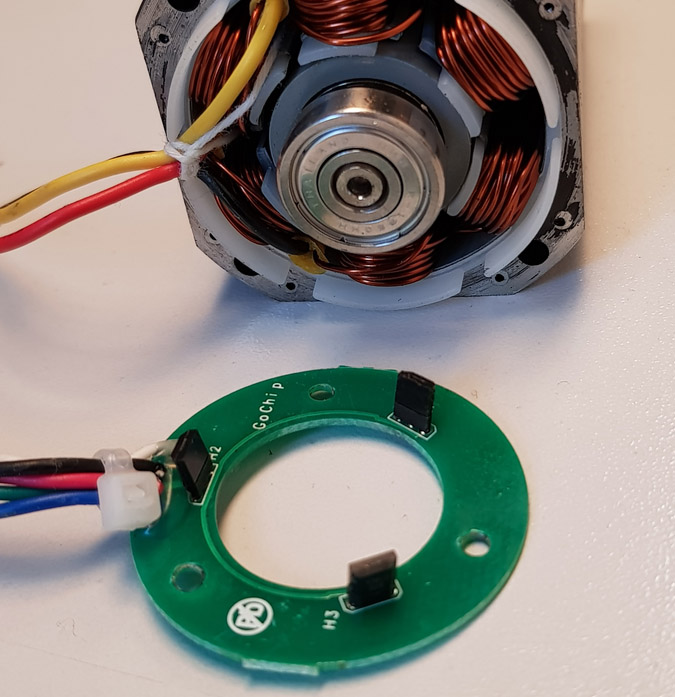
Датчики Холла
Выходные сигналы датчиков Холла управляют силовыми ключами, изменяя токи в обмотках статора. Датчики размещаются с интервалами в 120° для обозначения магнитных полюсов ротора. Датчики Холла реагируют на положение постоянных магнитов, прикрепленных к ротору.
Преимущества датчиков Холла:
- Устойчивость к радиочастотным помехам.
- Широкий диапазон рабочих условий.
- Высокая точность.
Магнитное поле ротора может обнаруживаться непосредственно датчиками Холла (IC), исключая необходимость в дополнительных магнитах. Однако датчики должны располагаться на достаточном расстоянии от обмоток статора, чтобы предотвратить влияние магнитного поля, создаваемого токами статора.
5. Особенности и преимущества BLDC-двигателей
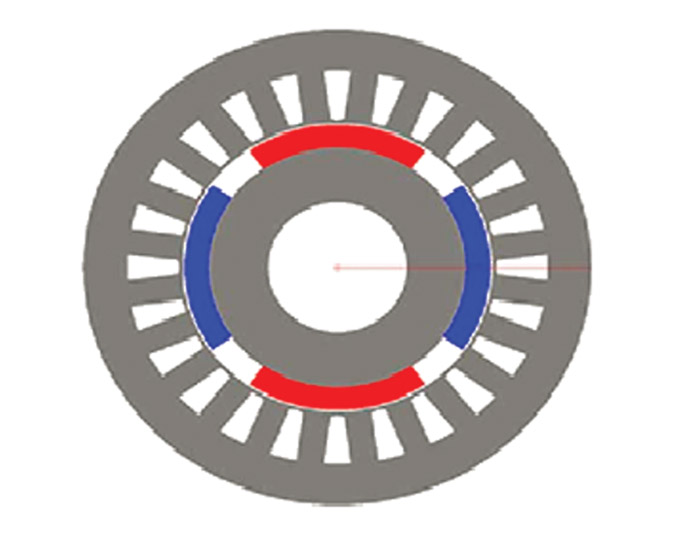
Рисунок 5. Четырехполюсный синхронный двигатель с постоянными поверхностными магнитами (PMSM).
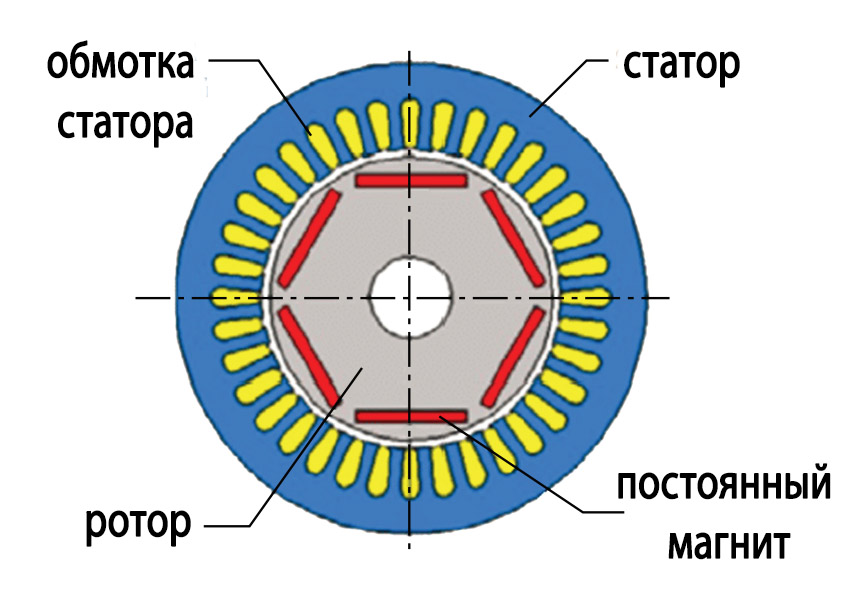
Рисунок 6. Шестиполюсный синхронный двигатель с внутренними (утопленными) магнитами (PMSM).
При правильном проектировании геометрии ротора внутренние или утопленные магниты могут обеспечивать синусоидальное распределение магнитного потока. Поэтому такие магниты используются в синусоидальных BLDC-двигателях.
7. Типы бесщёточных BLDC-двигателей
В зависимости от характера напряжения, индуцируемого в статоре, BLDC-двигатели классифицируются следующим образом:
- Трапецеидальные или с прямоугольной формой напряжения
- С синусоидальной формой напряжения
В трапецеидальном BLDC-двигателе индуцируемое напряжение имеет трапецеидальную форму. Для обеспечения плавной работы без пульсаций крутящего момента необходим фазный ток в виде квазипрямоугольной волны с интервалом 120°.
В синусоидальном BLDC-двигателе индуцируемое напряжение имеет синусоидальную форму. Для обеспечения плавной работы без пульсаций крутящего момента необходим фазный ток синусоидальной формы.
7.1 Трапецеидальный тип BLDC-двигателя
BLDC-двигатели трапецеидального или прямоугольного типа имеют концентричные обмотки. Магниты на роторе устанавливаются на его поверхности. ЭДС, индуцируемая в фазе статора, имеет трапецеидальную форму.
На рисунке 7 представлены синусоидальные и трапецеидальные формы напряжений, генерируемые в BLDC-двигателе.
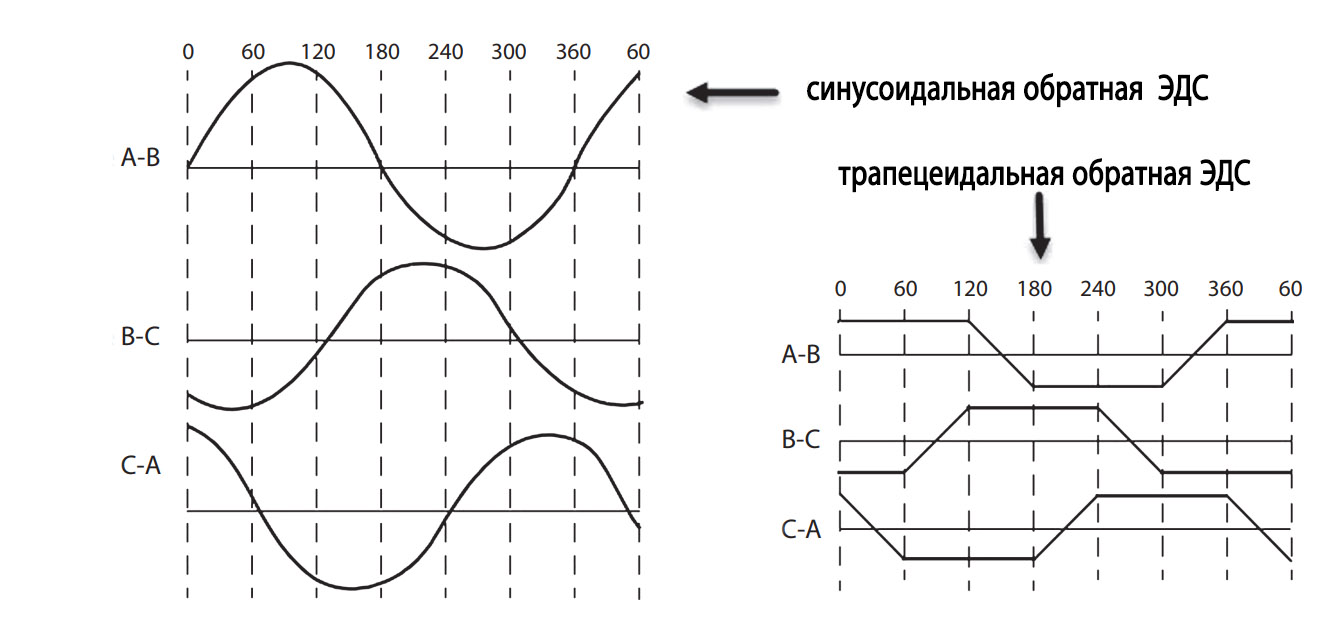
Рисунок 7. Синусоидальные и трапецеидальные волны ЭДС в бесщёточных BLDC-двигателе.
Преимущества трапецеидального типа бесщёточных BLDC-двигателей:
- Требуется недорогие датчики положения.
- Простая схема управления.
- Высокая эффективность инвертора, так как в любой момент времени включены только два ключа.
- Низкая стоимость.
- Меньше потерь при переключениях.
Недостатки трапецеидального типа бесщёточных BLDC-двигателей:
- Пульсации крутящего момента при каждом переключении.
- Меньше производимый крутящий момент.
- Акустические и электрические шумы.
7.2 Синусоидальный тип бесщёточного BLDC-двигателя
В синусоидальном BLDC-двигателе статор имеет распределенные обмотки, аналогичные синхронным двигателям. Ротор состоит из внутренних постоянных магнитов. Полюса ротора имеют такую форму, что индуцируемое в фазе статора напряжение будет иметь синусоидальную форму.
Преимущества синусоидального типа бесщёточного BLDC-двигателя:
- Ниже пульсации крутящего момента.
- Плавное движение.
- Максимум крутящего момента.
Недостатки синусоидального типа бесщёточного BLDC-двигателя:
- Требуется дорогой датчик положения.
- Требуется больше аппаратного обеспечения и обработки сигналов.
- Низкая эффективность инвертора, так как три ключа включены одновременно.
- Высокая стоимость.
8. Бесщеточный двигатель с прямоугольной волной
На рисунке 8 изображен бесщеточный мотор с прямоугольной волной. На этом моторе двухполюсный магнит имеет дугу полюса 180°. Волновая форма распределения магнитной индукции в воздушном зазоре представляет собой прямоугольную волну. При 180° дуге магнитов и 2-ух пазной обмотке статора, идеальная ширина плоской части волны составит 150°, но из-за эффекта рассеивания по краям магнитных материалов она сокращается до 120°.
Статор имеет распределенную 3-фазную обмотку, с количеством пазов в нем 12. Таким образом, на каждый полюс/фазу приходится 2 паза в статоре. Каждая фазная обмотка состоит из двух соседних катушек полного шага, каждая из которых содержит N1 витков, оси которых смещены друг относительно друга на 30°. Обмотка однослойная, и каждый паз статора содержит N1 проводников от одной фазной обмотки.
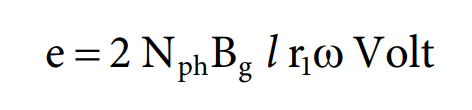
Индуцируемая ЭДС в катушке a1A1 определяется уравнением 1.
 (1)
(1)
Где:
e1=2N1Bglr1ω Вольт ,
ψ1max=N1Bgπlr1 ,
φ=Bgπlr1 ,
BgA, А — площадь пути магнитного потока, l — осевая длина магнита, r1 — радиус, e1 — величина прямоугольной волны ЭДС ea1.
Индуцированная ЭДС во второй катушке фазы A будет идентичной, но отставать по фазе на 30°, как показано на рисунке 9.
Результирующее фазное напряжение будет суммой двух отдельных напряжений катушек, так как эти две катушки соединены последовательно. Эффект распределенной обмотки на две катушки заключается в образовании ступенчатой волны ЭДС.
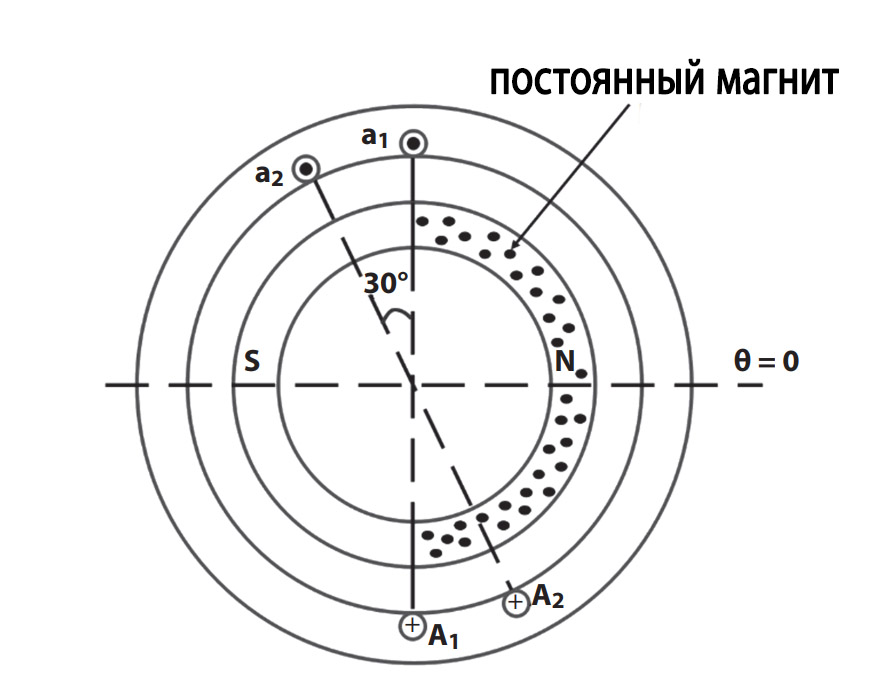
Рисунок 8. Бесщеточный мотор с прямоугольной волной: две катушки одной фазы.
Форма волны имеет трапецеидальную форму, характерную для бесщеточного двигателя постоянного тока, как показано на рисунке 9. (Эффект рассеяния приводит к закруглению углов, что показано пунктирными линиями).
При использовании дуг магнитов 180° и двух пазов статора ширина плоской вершины волны составит 150°, но из-за эффекта рассеяния она уменьшается до 120°.
Величина фазной ЭДС (плоская вершина) определяется уравнением (2):
 (2)
(2)
где:
Nph — число витков, соединенных последовательно на фазу, ω — механическая угловая скорость (радиан/секунда).
В данном случае Nph=2N1, если учитывать, что две катушки соединены последовательно.
Механическая мощность, развиваемая двигателем (при условии, что работают две фазы), определяется уравнением (3):
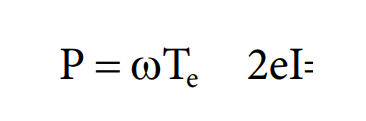 (3)
(3)
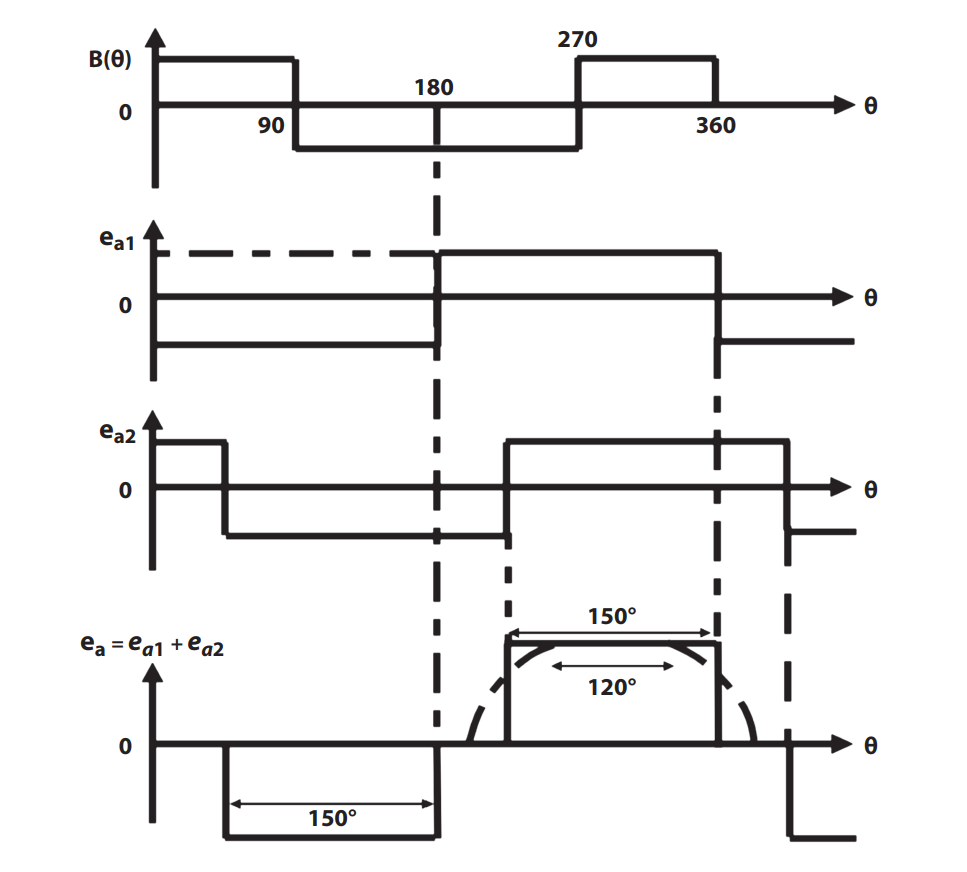
Рисунок 9. Прямоугольные формы волн бесщеточного двигателя постоянного тока.
Электромагнитный момент определяется уравнением (4):
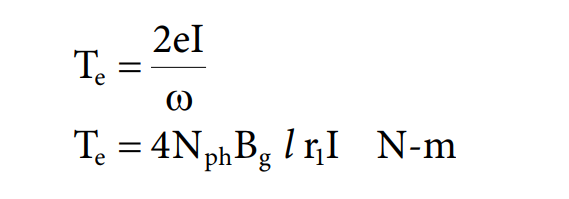 (4)
(4)
Это уравнение электромагнитного момента для BLDC двигателя с прямоугольной волной.
9. Характеристика момента/скорости BLDC двигателя
Уравнение напряжения для BLDC двигателя задается следующим образом (5):
 (5)
(5)
где: r — суммарное сопротивление двух фаз, соединенных последовательно, e — суммарное напряжение двух фаз, соединенных последовательно.
Напряжение e определяется по уравнению (6):
 (6)
(6)
где: k=4, Nph — постоянная обмотки якоря, Nph — число витков на фазу в серии,
Таким образом, напряжение V=k⋅ω+I⋅R
 (7)
(7)
Рисунок 10 показывает зависимость момента от скорости бесщеточного BLDC двигателя при двух различных напряжениях, представленных уравнением 7.
С увеличением скорости момент линейно уменьшается. Наклон кривой является постоянным и определяется выражением k2/R. Эта характеристика не зависит от напряжения на клеммах двигателя и его скорости.
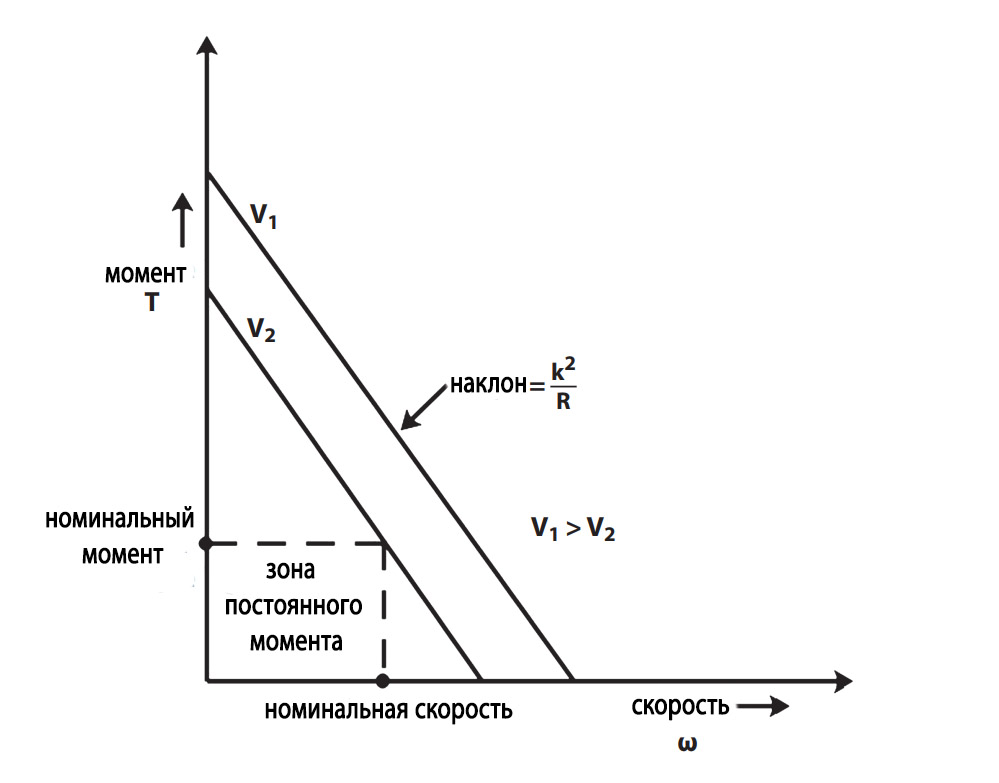
Рисунок 10. Кривые зависимости крутящего момента от скорости для BLDC мотора
10. Применение BLDC моторов
Бесщеточные двигатели постоянного тока (BLDC) широко используются в различных областях, таких как промышленная автоматика, автомобильная и авиационная промышленность, системы автоматизации и т. д.
Основные области применения BLDC моторов включают:
• Дисковые накопители
• DVD и CD плееры
• Электрические транспортные средства и другие аккумуляторные устройства
• Сервоприводы
• Робототехнические устройства, станки с числовым программным управлением и конвейеры
• Стиральные машины
• Компрессоры, сушилки и вентиляторы
• Насосы и воздуходувки
11. Заключение
В этой главе рассмотрены конструкция BLDC мотора, система привода BLDC мотора и конфигурации роторов, обычно используемые для моторов с постоянными магнитами (PMBLDC).
Также обсуждены типы BLDC моторов и их сравнение. Рассмотрены типы датчиков положения ротора, используемые для определения положения магнитных полюсов ротора. Представлены уравнения для ЭДС и крутящего момента для мотора с прямоугольной волной. Описаны преимущества, различные особенности и области применения BLDC моторов.
Основные преимущества BLDC моторов — это малый размер ротора, высокая мощность, высокий коэффициент крутящего момента к инерции, низкий уровень шума, высокая эффективность и низкие требования к обслуживанию. Система привода BLDC мотора требует датчиков положения ротора, силового электронного преобразователя и устройства управления, что увеличивает стоимость системы привода. Тем не менее, преимущества существенно перевешивают недостатки.